
Inhaltsverzeichnis
Im Artikel Deltang Komponenten hatte ich den Empfänger Rx62 von Deltang für die Lok meines Grubenbahn-Projekts vorgestellt. In der Lieferung war noch ein Empfänger enthalten. Den Rx61 Empfänger möchte ich für den Einbau in eine Diema-Lok vorbereiten. Erstmalig verwende ich ein Soundmodul für den Akkubetrieb. Wie kam es dazu? Auf einer Messe sah ich kleine Modellszenen mit fahrenden Lastkraftwagen im Maßstab 1:87. Viele dieser kleinen Fahrzeuge gaben Geräusche ab. Diese Fahrzeuge habe ich mir genauer angesehen. Dort waren Soundmodule von Benedini eingebaut. Diese wurden durch Akkus gespeist und durch Fahrregler gesteuert. Auch mit kleinen Lautsprechern gaben die Modelle beachtliche Töne ab. So ein Soundmodul möchte ich jetzt in ein Feldbahn-Fahrzeug einbauen. Dazu muss der Baustein an den Deltang-Empfänger angeschlossen werden.
Sound ist ein großes Feature in digitalen Modellbahnsystemen. Mit dem Loksound V4.0 von ESU im DCC-System hatte ich bereits einige Erfahrungen sammeln können (siehe Artikel zur Ns2f). Doch jetzt scheint diese wichtige Funktion kein Alleinstellungsmerkmal der schienenstrombasierenden Systeme zu sein. Mal sehen, wie der Sound klingt.
Die Diema-Lok wird eine Funksteuerung mit folgenden Funktionen erhalten:
- Beleuchtung vorn/hinten
- Innenbeleuchtung Führerhaus
- Status-Led
- Motor-Sound
- Hupe
Dafür werden 6 Ausgänge am Empfänger benötigt. Da der Rx62-Empfänger von Deltang nur 5 Ausgänge bereitstellt, habe ich den Rx61 mit 8 Ausgängen gewählt. Die 6 benötigten Ausgänge sind wie folgt beschaltet.
| Ausgang | Funktion |
|---|---|
| P1 | Licht vorn |
| P2 | Licht hinten |
| P3 | Innenbeleuchtung |
| P4 | Status-Led |
| P5 | Servoausgang Soundmodul (Fahren) |
| P6 | Servoausgang Soundmodul (Steuerung) |
- Die Lichtfunktion an P1 und P2 wird über den Bind-Taster (Kanal 5) des Tx20 geschaltet
- Die Innenbeleuchtung an P3 wird über den Funktionstatster 1 (Kanal 2) des Tx20 geschaltet
- Der Ausgang P5 erhält eine Signalkopie des Motorausgangs
- Der Ausgang P6 wird durch den 3-Wege-Taster (Kanal 3) geschaltet.
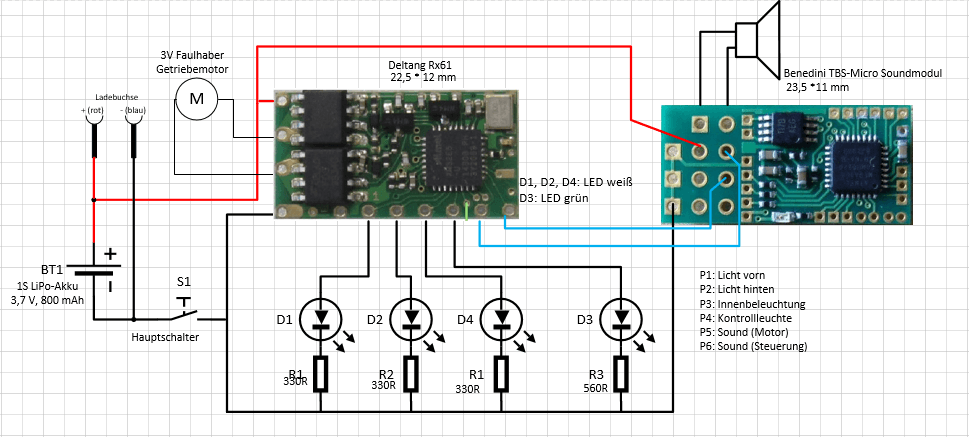
Das Soundmodul TBS Micro V2.0 ist genau richtig für mein Fahrzeug. Mit den Abmessungen ca. 12 * 25 mm ist es etwa so groß wie der Deltang-Empfänger. Ein 1S-Lipo-Akku mit 3.7 V reicht als Spannungsquelle aus. Das Soundmodul hat eine eine Ausgangsleistung von 0.6 W bei 3 V. Maximal können 1 Watt ab 5 Volt Spannung abgerufen werden.
Der Deltangempfänger und das Benedini-Soundmodul werden über zwei Anschlüsse miteinander verbunden. Die beiden Ausgänge des Deltang-Empfängers arbeiten als Servoausgänge. Ein Ausgang wird durch den 3-Wegeschalter am Tx20 (Kanal 3) geschaltet. Auf den zweiten Ausgang ist das Motorensignal (Kanal 1) dupliziert.
Betriebsarten und Bedienung des Benedini-Soundmoduls
Das Soundmodul wird über einen 3-Wege-Schalter gesteuert. Das ist ein Kippschalter mit Nullstellung in der Mitte und je einem Taster nach links und rechts. Der Sender überträgt die Signale an den Empfänger zu einem Servoausgang. Er verhält sich genauso wie der Kippschalter. Schalter links bewegt das Servo nach links und Schalter rechts bewegt das Servo nach rechts. Ein Kanal der Funkfernsteuerung wird dafür benötigt.
Des Benedini-Soundmodul kennt zwei Bedienarten. Bei der „direkten Soundwahl“ sind zwei Geräusche definiert, die auf den beiden Tasterseiten des Kippschalters liegen. Eine gute Wahl ist das Motorengeräusch auf Taster oben und die Hupe auf Taster unten. Mit dem Tx20 als Funksender sieht die Bedienung wie folgt aus (Ich habe den 3-Wege-Schalter am Tx20 gedreht, deshalb oben und unten statt links und rechts):
- Kippschalter nach oben schaltet das Motorengeräusch ein (Anlassen und Leerlauf).
- Änderungen am Fahrregler (Geschwindigkeit) wirken sich auf das Fahrgeräusch aus.
- Kippschalter nach unten schaltet die Hupe solange zu, wie der Taster gedrückt wird.
- Kippschalter nach oben schaltet das Motorengeräusch aus (Motor ausgehen lassen).
Diese Bedienart ist mein Favorit, denn mehr benötigt ein Feldbahn-Diesel nicht.
Die andere Bedienart ist die „indirekte Soundwahl“, bei der aus vielen Geräuschen und Funktionen gewählt werden kann. Zum Abrufen eines Geräuschs bzw. Aufrufen einer Funktion muss am Tx20 immer folgendes getan werden: n mal Kippschalter nach oben tasten zur Auswahl der n-ten Funktion und anschließend den Kippschalter nach unten tasten zur Bestätigung. Eine Belegung im Soundmodul könnte wie folgt aussehen:
| Speicherplatz | Funktion |
|---|---|
| 1 | Motorgeräusch |
| 2 | Hupe |
| 3 | Ein anderes Geräusch |
| 4 | Lautstärke lauter |
| 5 | Lautstärke leiser |
Das Motorengeräusch wird gestartet, indem der Kippschalter je einmal nach oben und nach unten getastet wird. Motor ausschalten wird mit der gleichen Reihenfolge erreicht. Für die Hupe muss der Kippschalter zweimal nach oben und einmal nach unten getastet werden. Das ist zwar praktisch, weil viele Geräusche mit nur einem Schalter abgerufen werden können. Als Fahrer ist diese Bedienart für mich wenig intuitiv.
Die Bedienart muss vorher entschieden sein und programmiert werden. Für die Diema-Lok habe ich die Bedienart „direkte Soundwahl“ gewählt. Der Kippschalter am Tx20 (Kanal 3) ist somit für den Sound reserviert. Er hätte, außer für die Empfängerprogrammierung, sonst keine Funktion.
Reprogrammierung
Der Rx61-2 hat programmierte Standardwerte, die zur Ansteuerung des Soundmoduls und der Leds nicht passen.
- Ausgang P1: Licht vorn, LED2-Funktion (Status)
- P2: Licht hinten
- P3: Kanal 3, 3-Wege-Schalter am Tx20 unten
- P4: Kanal 3, 3-Wege-Schalter oben
- P5: Kanal 5, toggle
- P6 und P7: Kanal 3
- P8: Kanal5, Servo
Licht ist richtungsabhängig immer eingeschaltet, sobald der Fahrregler nicht in Nullstellung ist.
Einige Änderungen sind notwendig:
- Die Lichtfunktion wird über den Bindtaster (Kanal 5) ein- und ausgeschaltet
- Der Ausgang P3 (digital) für die Innenbeleuchtung wird über Kanal 2 (Funktionstaster 1 am Tx20) geschaltet (latching)
- Die Funktion LED2 wird auf den Ausgang P4 gelegt
- Das Motorsignal wird auf den Ausgang P5 (Servo) kopiert und der Ausgang P6 (Servo) wird über den Kanal 3 geschaltet
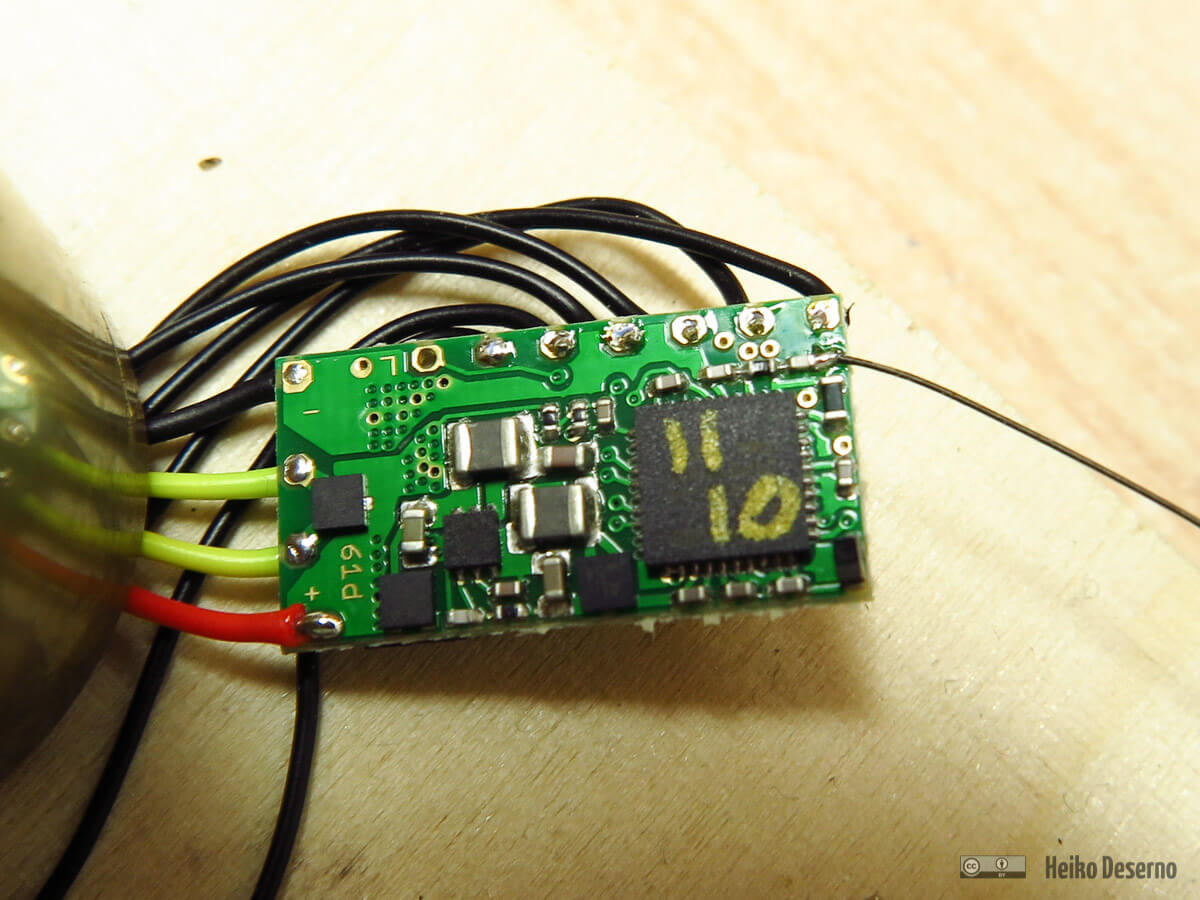
Wichtig ist die Programmieranleitung des Empfängers. Jede Software-Version hat eine eigene Anleitung. Mein Empfänger hat die Softwareversion 611. Erkennbar ist das an der „11“, die auf einen Chip des Empfängers gemalt wurde.
Die Änderungen der Einstellungen am Empfänger nehme ich mit dem Sender Tx20 vor. Einiges dazu habe ich im Artikel Deltang-Komponenten gezeigt. Sehr schön ist dieses Thema auch auf Riks Eisenbahnseiten beschrieben.
Aufgabe 1: Die Lichtfunktion wird über den Bindtaster (Kanal 5) ein- und ausgeschaltet

| Wert | Kommentar |
|---|---|
| 3 | Menü 3 |
| 1 | |
| 5 | Control Settings DIRLIGHT-2 |
| 5 | Channel 5 |
| 1 | Toogle on low |
Zusammengefasst die Ziffernfolge: 3, 1, 5, 5, 1
Aufgabe 2: Der Ausgang P3 (digital) wird über Kanal 2 geschaltet (latching)
Dieser Ausgang ist für die Innenbeleuchtung (weiße Led) vorgesehen.

| Wert | Kommentar |
|---|---|
| 3 | Menü 3 |
| 3 | Ausgang Pad 3 |
| 2 | Led on/off (latching) |
| 2 | Channel 2 |
| 1 | Toggle when Channel 2 is low |
Latching bedeutet, dass das Licht mit dem ersten Tastendruck am Tx20 ein- und mit dem nächsten Tastendruck ausgeschaltet wird.
Zusammengefasst die Ziffernfolge: 3, 3, 2, 2, 1
Aufgabe 3: Die Funktion LED2 wird auf den Ausgang P4 gelegt
Die Statusfunktion LED2 bekommt eine separate Led, die an Pad 4 angeschlossen wird.

| Wert | Kommentar |
|---|---|
| 7 | Menü 7 |
| 1 | Funktion LED2 |
| 2 | LED2 enabled |
| 4 | Ausgang Pad 4 |
Zusammengefasst die Ziffernfolge: 7, 1, 2, 4
Hinweis: Das Feature LED2 funktioniert an einem Ausgang etwas anders als die Status-Led auf dem Funkempfänger. Diese ist immer in Betrieb. Sie leuchtet, wenn ein Sender gebunden ist und sie blinkt im ungebundenen Zustand sowie während der Programmierung. Die zusätzliche Led blinkt auch während der Programmierung und im ungebunden Zustand, jedoch während des Betriebes ist sie verloschen. Ist sie dennoch eine Status-Led? Ich denke ja, weil sie nach dem Ausschalten des Senders blinkt und damit anzeigt, dass das Modell noch eingeschaltet ist. Und sie zeigt nach dem Einschalten an, ob ein Sender gebunden ist.
Aufgabe 4: Der Ausgang P5/P6 (Servo) wird über den Kanal 1/3 geschaltet
Das ist jetzt die wahrhaft interessanteste Einstellung. Der Sounddekoder benötigt zwei Servoausgänge. Auf Pad 5 wird das Motorsignal dupliziert und auf Pad 6 der 3-Wege-Schalter des Tx20. Für die Duplizierung des Motorensignals hatte ich erst die Funktion MMIX im Sinn. Alle Versuche haben jedoch nichts genützt. Deshalb nutze ich die Funktion SERVO-1.
Für das Motorensignal (Channel 1)

| Wert | Kommentar |
|---|---|
| 2 | Menü 2 |
| 5 | Ausgang Pad 5 |
| 1 | Output-Type SERVO-1 |
| 1 | Channel 1 |
| 1 | Normal speed |
Zusammengefasst die Ziffernfolge: 2, 5, 1, 1, 1
Und für die Steuerung (Channel 3)
| Wert | Kommentar |
|---|---|
| 2 | Menü 2 |
| 6 | Ausgang Pad 6 |
| 1 | Output-Type SERVO-1 |
| 3 | Channel 3 |
| 1 | Normal speed |
Zusammengefasst die Ziffernfolge: 2, 6, 1, 3, 1
Für den Test der Konfiguration dieser Ausgänge habe ich einen Mini-Servo angeschafft. Die Ausgänge müssen richtig funktionieren, sonst tut der Sounddekoder merkwürdige Dinge und es funktioniert nie.
Bei der ersten Inbetriebnahme muss der Sounddekoder laut Anleitung „eingelernt“ werden.
Etwas zur Lautstärke
Zu Beginn hatte ich schon bedenken, dass die Lautstärke mit 0,6 W Ausgangsleistung nicht reichen könnte. Mit einem Lautsprecher ESU 50323 (8 Ohm, 40 mm Durchmesser und runde Bauform mit Schallkapsel) ist die Lautstärke in Innenräumen viel zu laut. Leiser geht per Lautstärkeparameter in der Programmierung oder per Vorwiderstand. Leider ist die Programmierung nicht so einfach wie bei einem ESU Loksound Dekoder. Dieser wird aufs Programmiergleis gestellt und via Computer programmiert. Für den Benedini-Sounddekoder gibt es ein Programmierkabel. Das muss jedoch auf den Baustein gesteckt werden. Das funktioniert im eingebauten Zustand nicht mehr, da der Soundbaustein zusammen mit dem Funkempfänger in einem Schrumpfschlauch verschweisst wird. Im Buntbahnforum habe ich eine interessante Konfiguration gesehen, bei der die Lautstärke auch über den Sender geregelt werden kann. Dazu wird ein weiterer 3-Wege-Schalter benötigt, den ich an meinem TX20 von Deltang nicht habe. Deshalb kann ich diese Möglichkeit nicht nutzen. In der Erprobung nutze ich einen Vorwiderstand von 47 Ohm. Beim späteren Bau des Modells werde ich die Größe des Vorwiderstands anhand der Bausituation (konkreter Lautsprecher und Einbauort) bestimmen.
Messungen
Nun muss der Akku nicht nur den Funkempfänger, die Leds und den Motor versorgen, sondern auch den Sounddekoder. Einige Messungen:
| Stromaufnahme | Kommentar |
|---|---|
| 30 mA | Funkempfänger und Soundmodul eingschaltet, Motor und Sound aus |
| 110 mA | wie vor, zusätzlich Sound eingeschaltet |
| 150 mA | wie vor, zusätzlich zusätzlich Hupe an |
| 190 mA | Motor max. Drehzahl und Motorsound eingeschaltet |
| 200 mA | wie vor, zusätzlich Beleuchtung eingeschaltet |
Die Stromaufnahme der Feldbahnlok wird mit Sound bei max. 200 mA liegen. Bei dem vorgesehenen 1100 mAh Akku reicht das für 5,5 Stunden Fahrzeit. In der Praxis wird dieser Wert noch größer sein, weil die Lok nicht ständig mit maximaler Geschwindigkeit und Licht fährt.
Soundvergleiche
Der Klang des Sounddekoders ist abhängig vom verwendeten Lautsprecher. Ich hatte diese Erfahrungen bereits mit den ESU-Loksound Bausteinen. Ich habe ein kleines Hörspiel-Video erstellt, dass den Klang des Soundmoduls an verschiedenen Lautsprechern zeigt. Weiterhin ist ein Vergleich zum Feldbahnsound (Kleindiesellokomotive) von ESU im Hörvideo enthalten.

Je größer der Lautsprecher, destso besser der Klang. Für mein Feldbahnmodell im Maßstab 1:22,5 kommen nur die folgenden beiden Modelle in Frage:
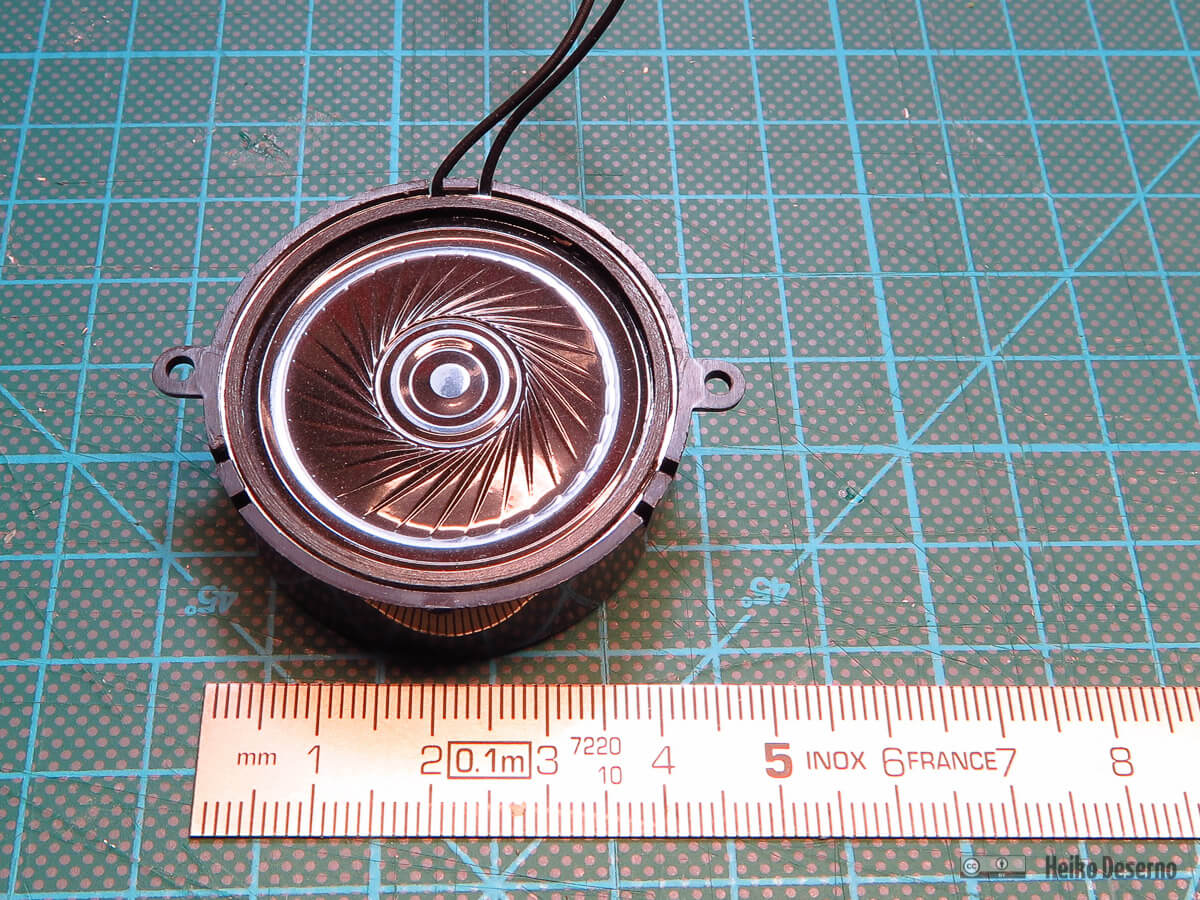
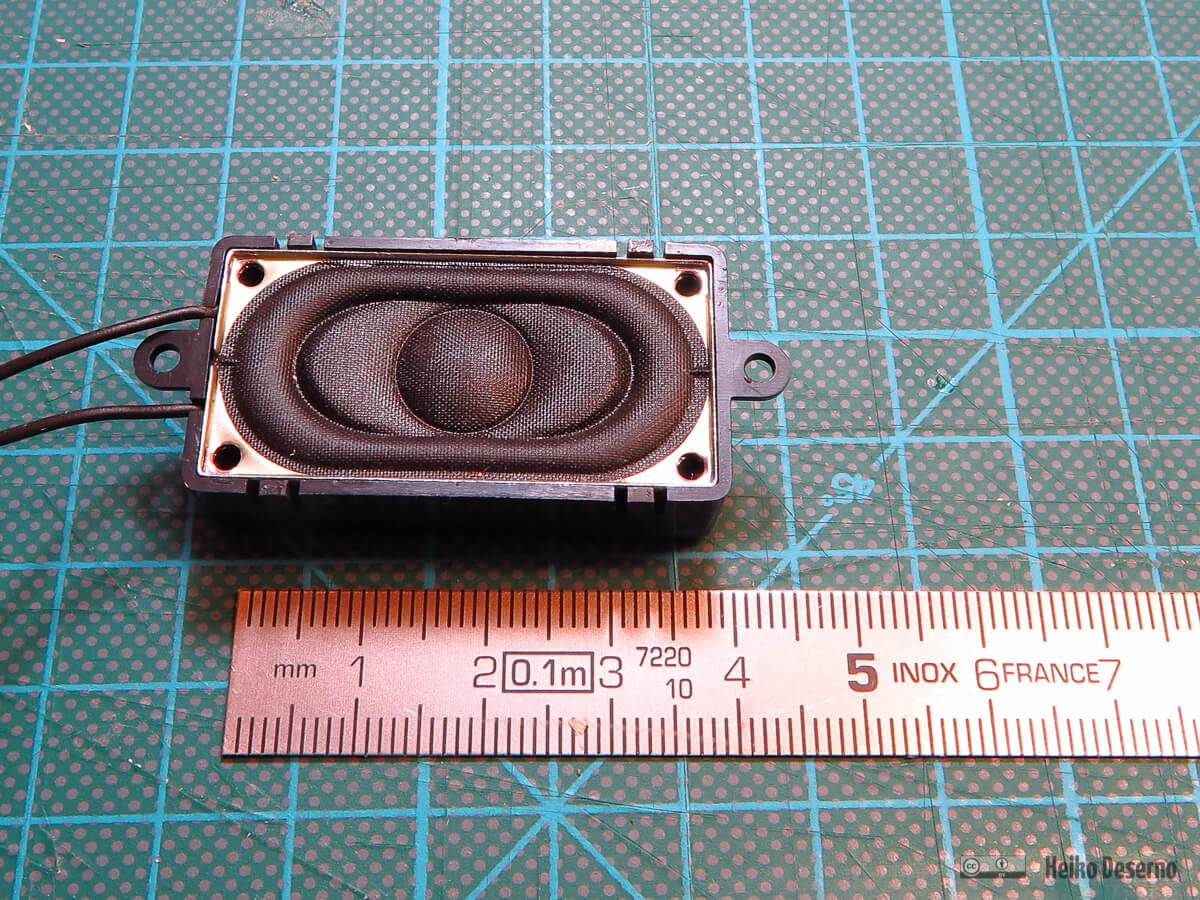
Hinweis: Die an das Benedini-Soundmodul angeschlossenen Lautsprecher müssen mindestens 8 Ohm Impedanz haben. Der ESU-Lautsprecher mit 4 Ohm benötigt einen Vorwiderstand in Reihe.
Was ich noch nicht angsprochen hatte, ist die Auswahl eines passenden Sounds. Auf der Benedini-Seite werden Sounds für die Bereiche Flugzeuge, Panzer und Kraftfahrzeuge gezeigt. Der Eisenbahnbereich ist nicht vertreten. Dennoch war Herr Benedini sehr hilfsbereit bei der Anfertigung eines passenden Sounds. Als Vorlage standen diverse Videos des 4-Zylindermotors einer Diema DS 60 zur Verfügung. Im dem Hörvideo zeige ich auch einen Vergleich zwischen dem Original- und dem Modellsound. Das Ergebnis kann sich wirklich sehen lassen.
Fazit
Ich habe ein sehr gutes Soundmodul für den Akkubetrieb in meinen Feldbahnlokomotiven gefunden. Der Benedini-Sounddekoder und der Deltang-Funkempfänger verstehen sich sehr gut. Die Inbetriebnahme der beide Bausteine war etwas aufwendig, weil diese Konfiguration noch nicht so häufig publiziert wurde. Alle gefundenen Informationen haben das Thema sehr oberflächlich behandelt.
Die Qualität des Sounds gefällt mir. Ich denke, dass der ESU-Sound an einigen Stelle mehr Funktionen hat. Mit fiel zuerst das Quietschen der Bremsen auf. Die Programmierung des ESU-Loksounds geht per Software und ESU-Programmer sehr einfach. Dabei wird die Lok einfach auf das Programmiergleis gestellt. Auch für das Benedini-Soundmodul gibt es ein Programmierkabel und eine Software. Das Kabel muss zur Programmierung an das Soundmodul gesteckt werden. Also Vorsicht mit dem Einpacken der Elektronik in Schrumpfschläuche. Was alle Soundmodule falsch machen, ist der stetig ansteigende Motorsound mit steigender Drehzahl. Dabei haben Feldbahnloks Schaltgetriebe (Diema DS 60 mit 4-Gang-Getriebe), sodass das Motorgeräusch mit schnellerer Fahrt durch einen Gangwechsel wieder abfallen müsste. Diese Umsetzung ist vermutlich schwierig.
Die Eingangs gestellte Frage, ob beide Soundmodule vergleichbar sind, würde ich nach meinen Versuchen bejahen.
Nicht zu unterschätzen ist der Platzbedarf der Elektronik. Auch wenn Funkmodul und Sounddekoder nicht groß sind, benötigen der Lautsprecher und ein größerer Akku jede Menge Platz. Nicht umsonst habe ich für mein nächsten Bauprojekt eine „große“ Feldbahnlok der 8 t Klasse gewählt. In eine kleine Lok wie die Diema DS12 wäre der Einbau für mich unmöglich.
Im nächsten Jahr starte ich mit dem Bau der Diema-Lok, die dieses Soundmodul beinhaltet.