
Inhaltsverzeichnis
Mission
Zwei Jahre ist es her, da entstand hier ein Pony JW8 im Maßstab 1:22,5 (siehe Artikel 80: „Jenbacher Pony JW8“). Jetzt gibt es eine Neuauflage im Maßstab 1:13. Die doppelte Baugröße im Vergleich zum ersten Modell verspricht viel Platz und viele Details. Als Basis dient nicht die Konstruktion des kleinere Modells, sondern eine viel ausgereiftere Konstruktion vom Sandbahner. Und dieses Mal ein motorisiertes Modell mit Funksteuerung.
Hinweis
Die 3D-Modelle für diesen Beitrag konstruierte der Sandbahner von den Feldbahnsinnigen. Die Modelle können aus urheberrechtlichen Gründen hier nicht veröffentlicht werden.
Vorbild
In den Jenbacher Werken (Tirol) startete die Lokomotiv-Produktion 1949. Die JW8 – auch als Jenbacher Pony bezeichnet – war die erste produzierte Lok. Sie zählte mit zu den kleinsten Feldbahn-Lokomotiven. Der Einzylinder-Viertakt-Dieselmotor leistete 8 PS und die Kraftübertragung erfolgte mit Ketten. Die Grundausführung war sehr schlicht ohne Achsfederung, ohne Gangschaltung und ohne Anlasser. Ca. 550 Stück der 1,2 t schweren Lok wurden von 1949 bis 1989 gebaut.
Das hier im Modell umgesetzte Lok entspricht im Vorbild der späteren Ausführung (ab 1962) mit gestanzten Löchern im Frontblech.
- Masse: 1200 Kg
- Abmessungen: 1720 x 940 mm (Länge x Breite)
- kleinster Kurvenradius 6 m
Modell
Übersicht
Diese im Vorbild kleine Feldbahnlok eignet sich wegen geringen Achsabstands hervorragend für den Einsatz auf den engen Radien der LocoRemote-Gleise. Aus diesem Grunde erhielt sie als eine meiner wenigen Modelle einen Antrieb. Ansonsten ist der Aufbau recht einfach gehalten. Es gibt einen Lokrahmen, eine Motorhaube sowie die Rückwand.

Steuerung
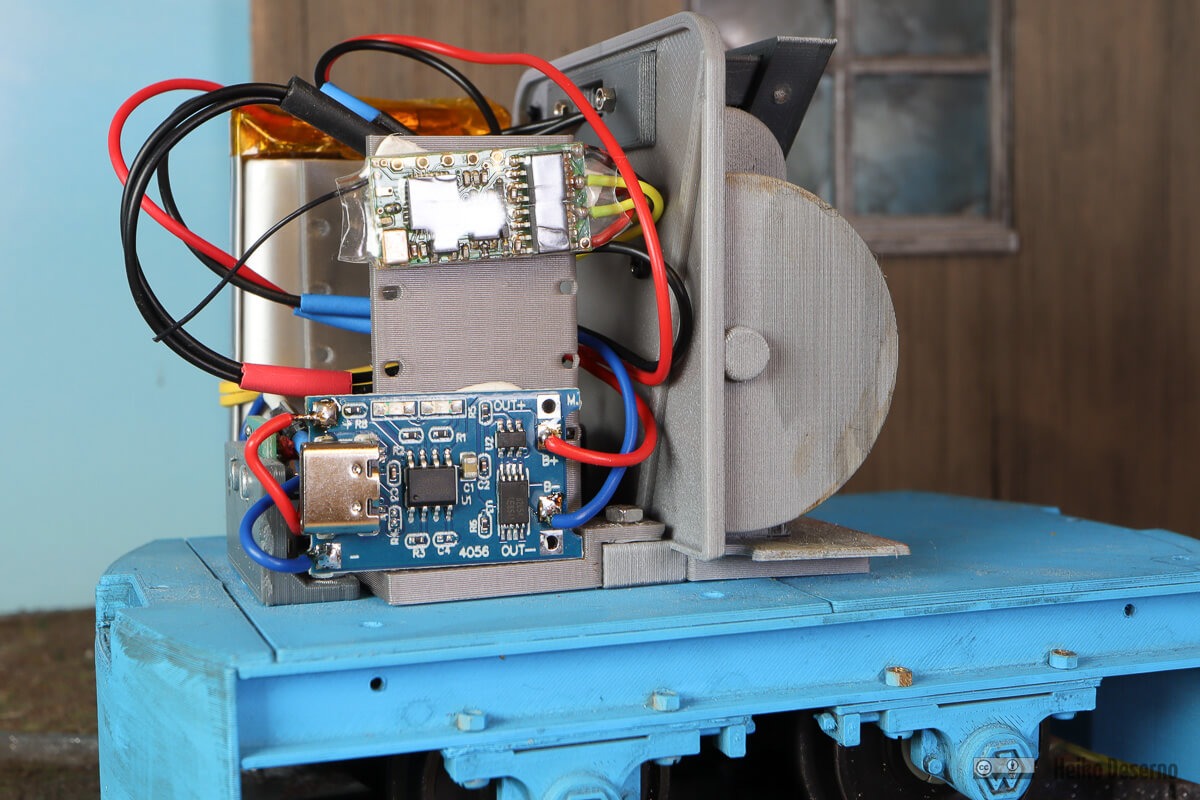
Das Modell wird gesteuert mit einer Funkfernsteuerung auf Deltang-Basis. Im Motorvorbau ist ausreichend Platz für einen 1800 mAh LiPo 1S Akku, den Deltang-Empfänger und eine TP4056 Ladeschaltung. An der Unterseite des Modells ist eine USB-Buchse montiert. Als Bedienelement gibt es nur den Einschalter für die Funksteuerung. Eine Status-Led konnte ich nicht ohne weiteres anschließen, obwohl die Led-Aussparung in der Lok vorhanden ist. Der Empfänger Rx60 wurde eingeschweißt mit Anschlussleitungen geliefert, leider ohne Leitungen an den Funktionsausgängen. Ladeschaltung und Funk-Empfänger wurden so platziert, dass die Leds durch die Gehäuseöffnungen sichtbar sind.
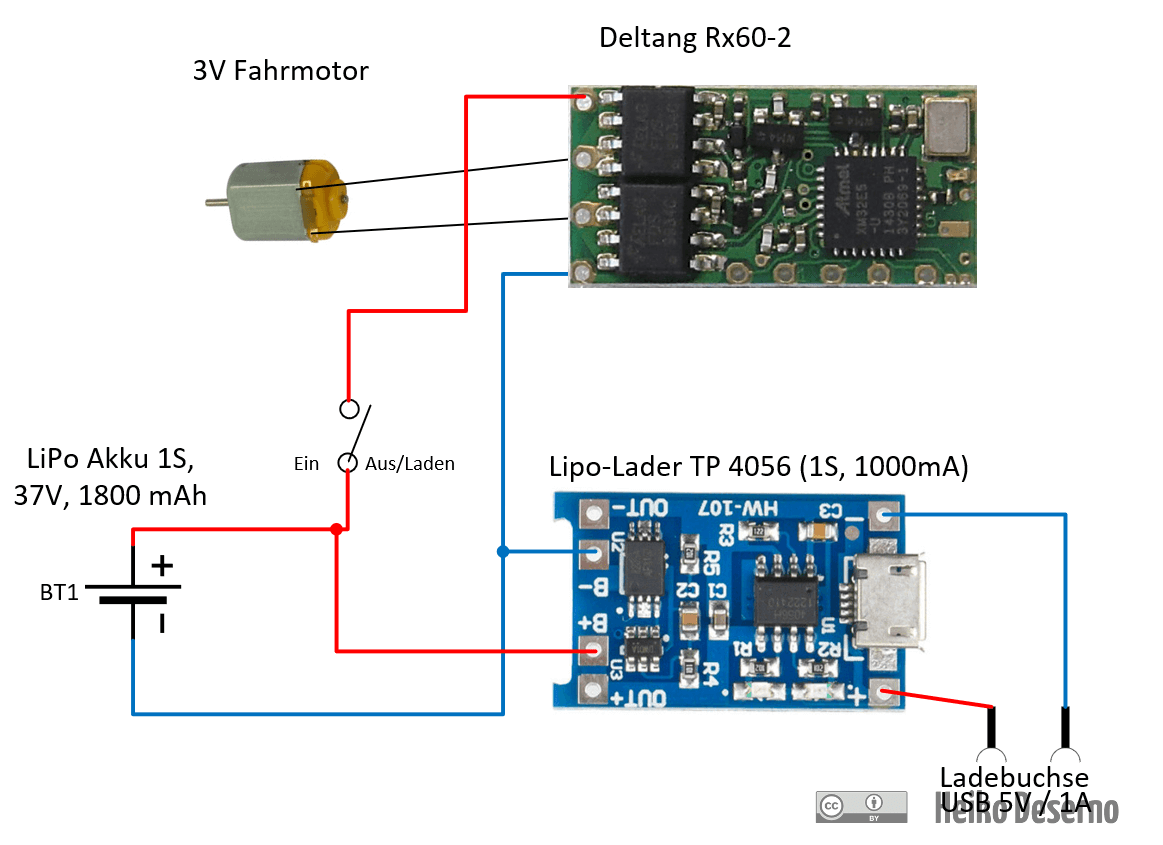
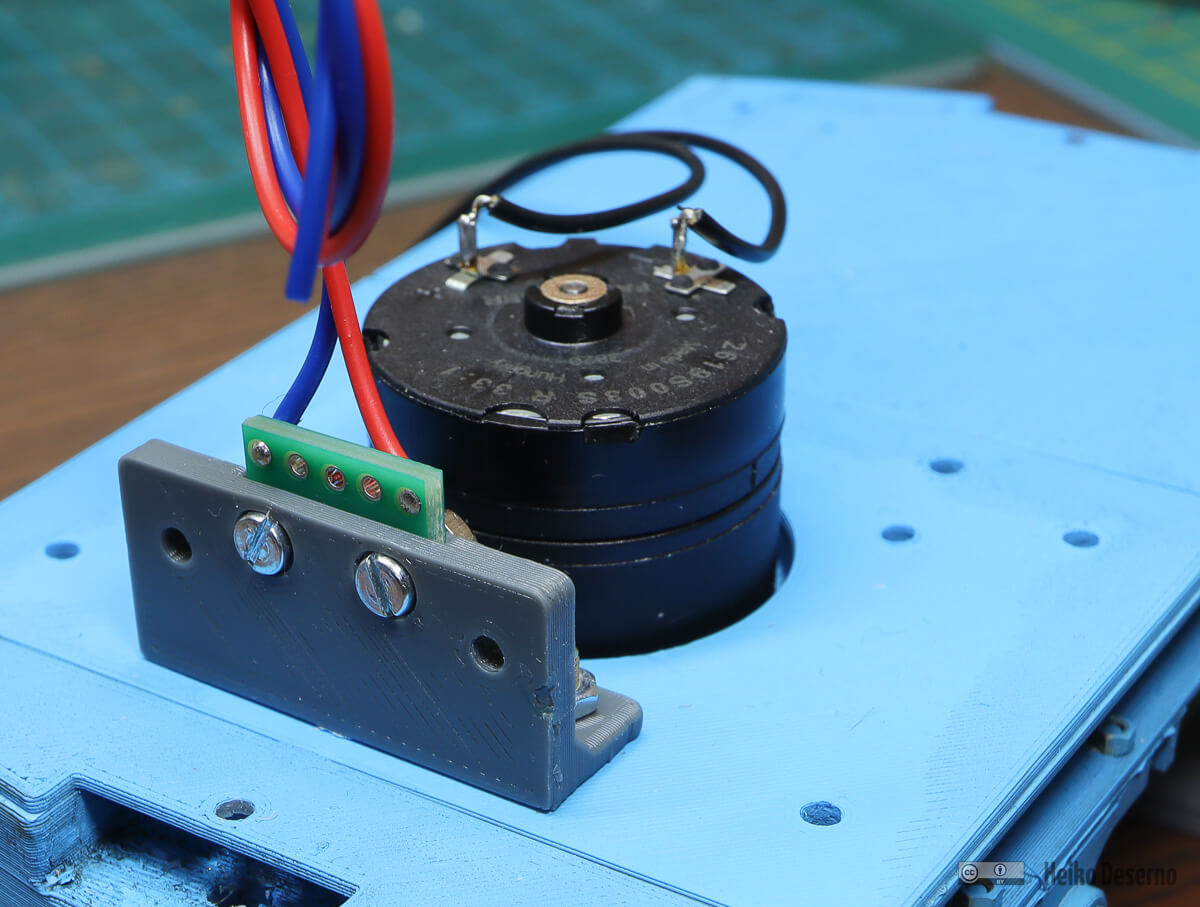
Als Motor habe ich einen Faulhaber-Getriebemotor 2619333 gewählt. Der 26 mm Motor hat ein Getriebe 1:33 integriert und leistet 1 W bei 150 U/Min und 3 V Betriebsspannung. Das ist genau das richtige Setup für Fahrzeuge mit 1S-LiPo-Akkus. Umgerechnet entsprechen 150 U/min im Maßstab 1:13 und 26 mm Radscheiben etwa 10 Km/h Vorbildgeschwindigkeit. Leider ist dieser Motor in der 3V-Variante ein Auslaufmodell und zudem auch nicht ganz billig.
Der Lipo-Lader ist fest mit dem Akku verbunden. Der Ruhestrom der Ladeelektronik fällt nicht ins Gewicht. Zum Laden wird der Hauptschalter der Lok ausgeschaltet und das USB-Kabel angeschlossen. Während des Ladens leuchtet die rote Status-Led auf der Lader-Platine. Ist der Akku voll, leuchtet die blaue Led. Nach dem Abziehen des USB-Kabels leuchte auf dem Lader keine Led.
Nach dem Einschalten der Lok leuchtet die orange-farbene Led dauerhaft, wenn ein Sender gefunden wurde. Ohne gefundenen oder gebundenen Sender blinkt die Led langsam. Nach einiger Zeit wird das Blinken schnell, was den Bind-Modus anzeigt. In dieser Phase kann ein neuer Sender an den Empfänger gebunden werden. Dazu wird, wenn der Empfänger im Bind-Modus ist, am ausgeschalteten Sender die Bind-Taste und danach die On-Taste gedrückt. Nach einigen Sekunden verbinden sich Sender und Empfänger und die Empfänger-Led leuchtet dauerhaft.
Aufgrund des geringen Stromverbrauchs des Faulhaber-Motors 2619 und des Empfängers hält eine Akkuladung viele Stunden.
Auch in diesem Modellbau-Projekt konnte ich mich nicht zum Einbau zu einer alternativen Steuerung wie LocoRemote oder Microrail (siehe Artikel 123: „microrail - Eine Modellsteuerung“) durchringen, die liebgewonnene Deltang-Technik ist einfach zu gut. Und solange es noch Material gibt, ist das die Modellbahnsteuerung meiner Wahl.
Lokrahmen mit Antrieb


Der Lokrahmen ist tatsächlich ein aus Einzelteilen zusammengesetzter Rahmen. Die Einzelteile wurden verklebt. Die Hohlräume der Puffer vorn und hinten wurden mit Blei als Zusatzgewicht gefüllt und vergossen. Der abgebildete Radsatz mit Radreifen aus Metall kam so nicht zum Einsatz. Auch fehlt im Bild noch die Motorplatine. Auf der Grundplatte des Lokrahmens gibt es einen Steg als Montagehilfe, der anschließend entfernt wurde. An dieser Stelle sitzt die Motorplatine.
Die feinen Achslager wurden mit Filament hergestellt (kleinen Drucker: Düse 0.25 mm, Schichthöhe 0,1 mm). Die Befestigung am Rahmen erfolgte mit M 1.6 Schrauben.
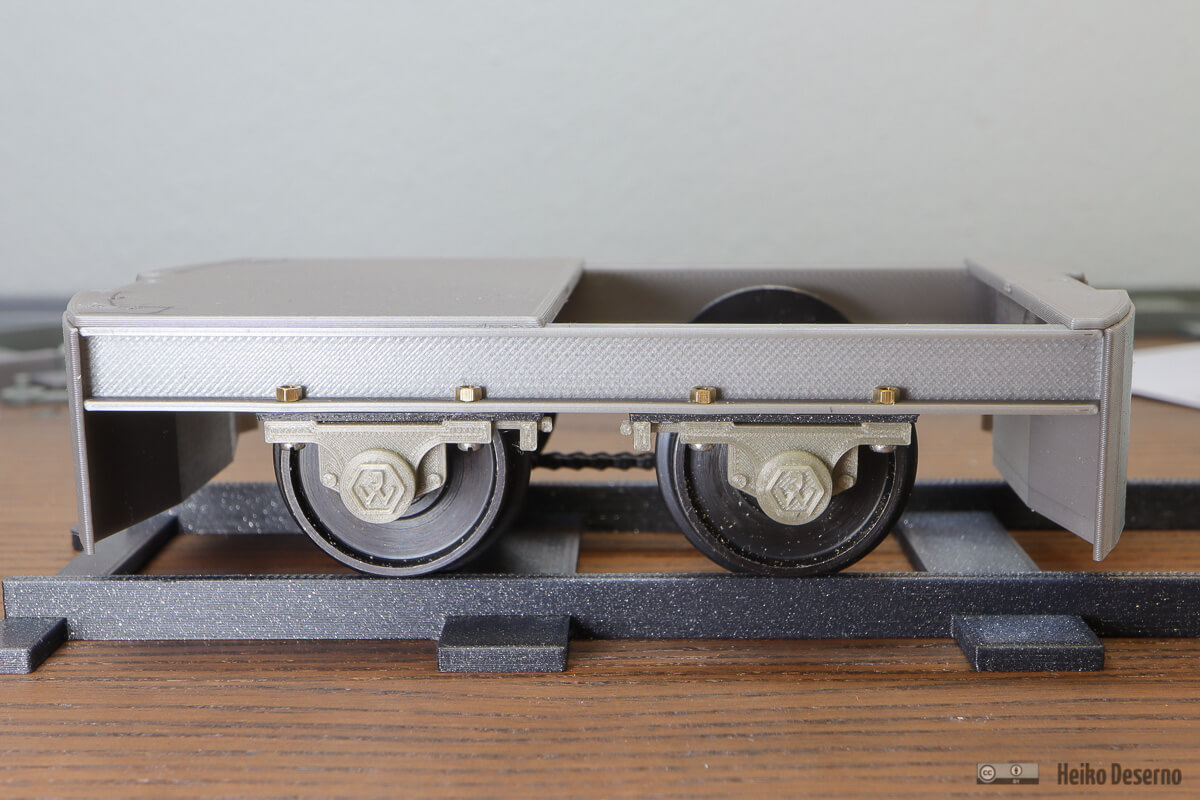

Auf den 3 mm Messing-Achsen stecken 26 mm Scheibenräder (Vorbild ca. 350 mm) von Heyn. Dazu wurden die Heyn-Radsätze zerlegt und die Scheiben mit gedruckten Radeinsätzen auf den Achsen montiert. Da der Spurkranz recht hoch ist, musste eine Erhöhung für die Achslager eingesetzt werden.
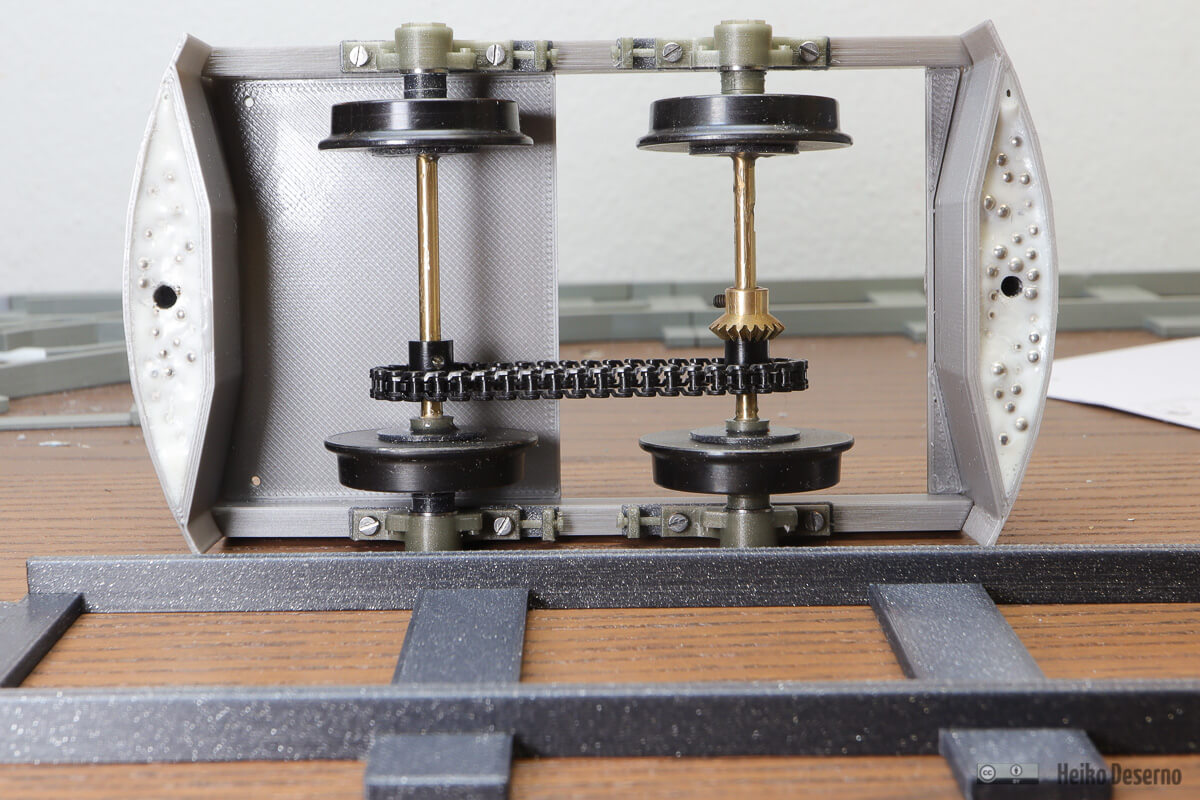
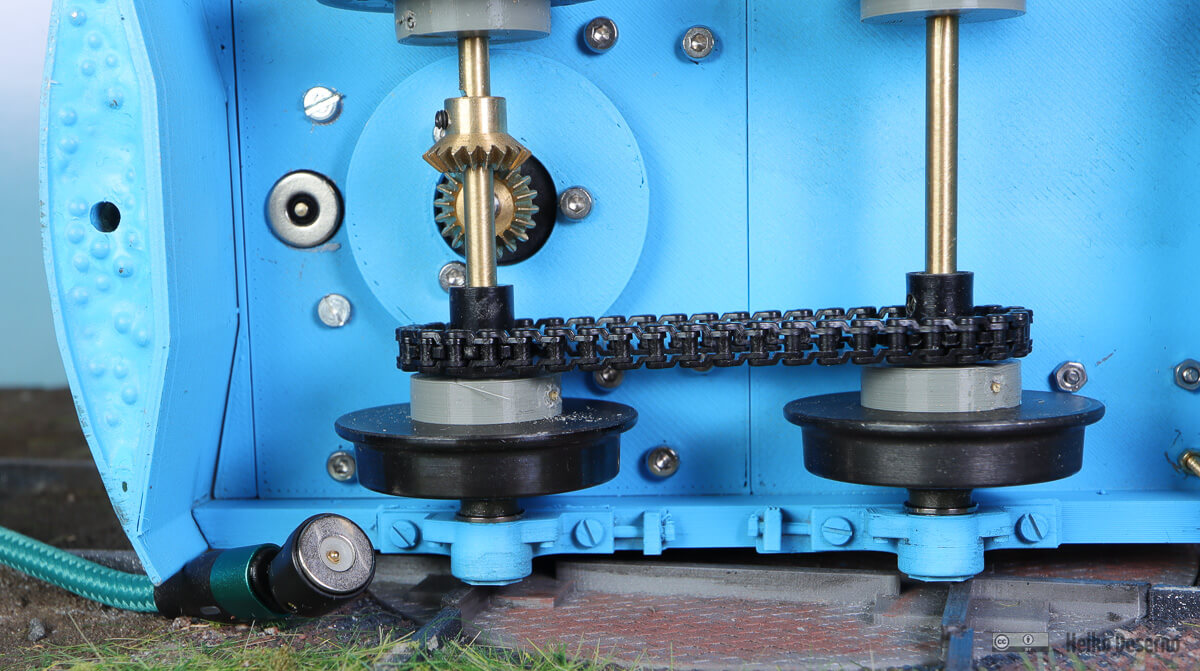
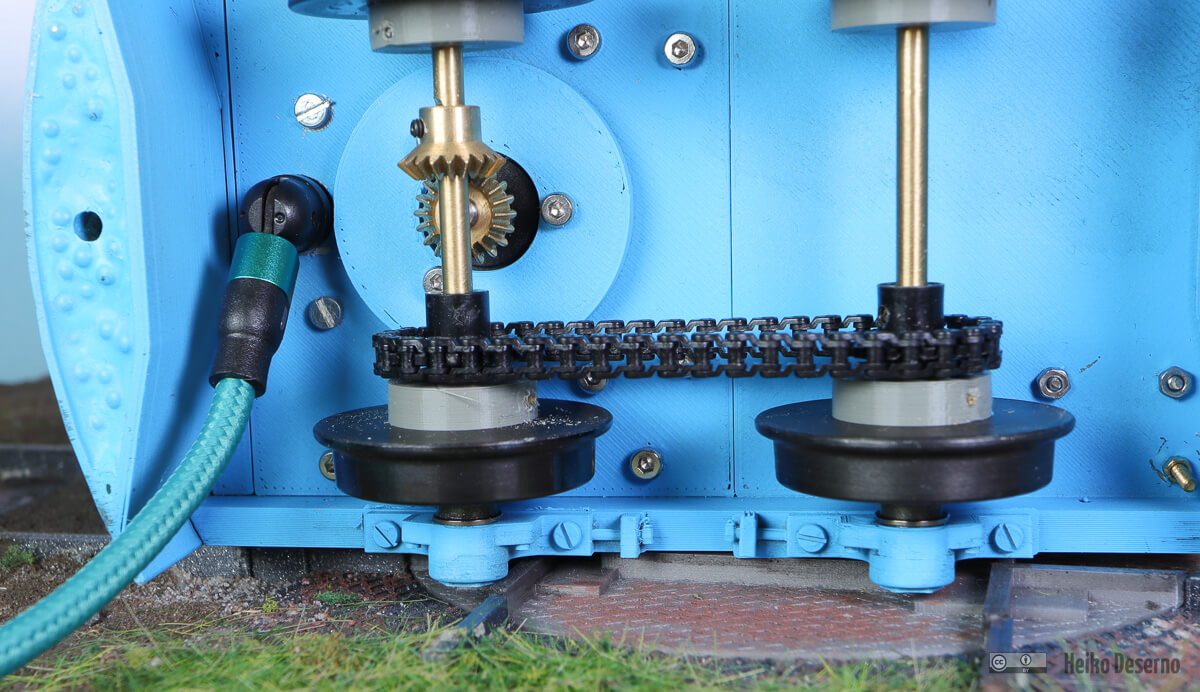
Auf dem nächsten Bild ist bereits das bewährte Antriebskonzept erkennbar. Der Motor treibt über ein Kegelradgetriebe (20 Zähne, Modul 0,5) eine Achse an. Die Kraft wird per Kette und Kettenräder auf die zweite Achse übertragen. Beide Achsen sitzen in Kugellagern 6 x 3 x 2,5 mm.
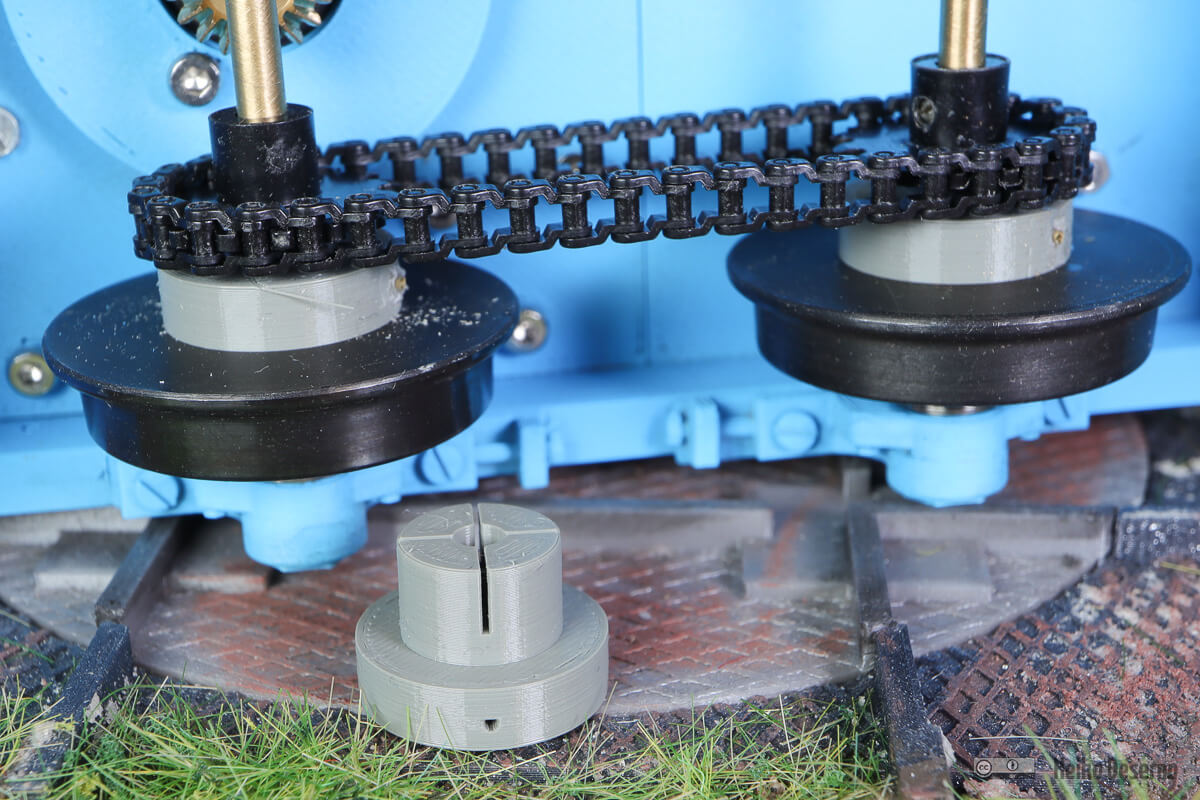
Beim Aufbau der Radsätze hatte ich wegen der schweren Radscheiben Befürchtungen, dass diese auf der Achse dauerhaft nicht halten könnten und irgendwann einfach durchdrehen. Deshalb kamen verstärkte Radkerne zum Einsatz. Nach der Justierung der Radscheiben auf der Achse kann ein Loch durch Radkern und Achse gebohrt und anschließend ein Draht eingeklebt werden. So sitzten die Radscheiben jetzt super fest auf den Achsen.

Ein Teil fehlte bislang noch am Lokrahmen: die Motorplatine. Sie ist in meinem Beispiel für einen Faulhaber 2619 Getriebemotor ausgelegt. Man könnte auch einen Halter für einen anderen Getriebemotor konstruieren. Im Artikel-Download ist noch eine Motorhalterung für einen 16 mm Getriebemotor enthalten. Wichtig sind die anderen Bohrungen, mit denen weitere Aufbauteile befestigt werden. Die Frage der Ladebuchse ist konstruktiv nicht ganz ausgereift. Die vordere Bohrung war ursprünglich für die 3.5 mm Klinkenbuchse zum Laden des Akkus vorgesehen. Später wurde jedoch eine andere Lösung angefertigt.

Der fertige Rahmen mit Metallrädern bringt 280 g auf die Waage.
Aufbau mit Motorhaube und Rückwand
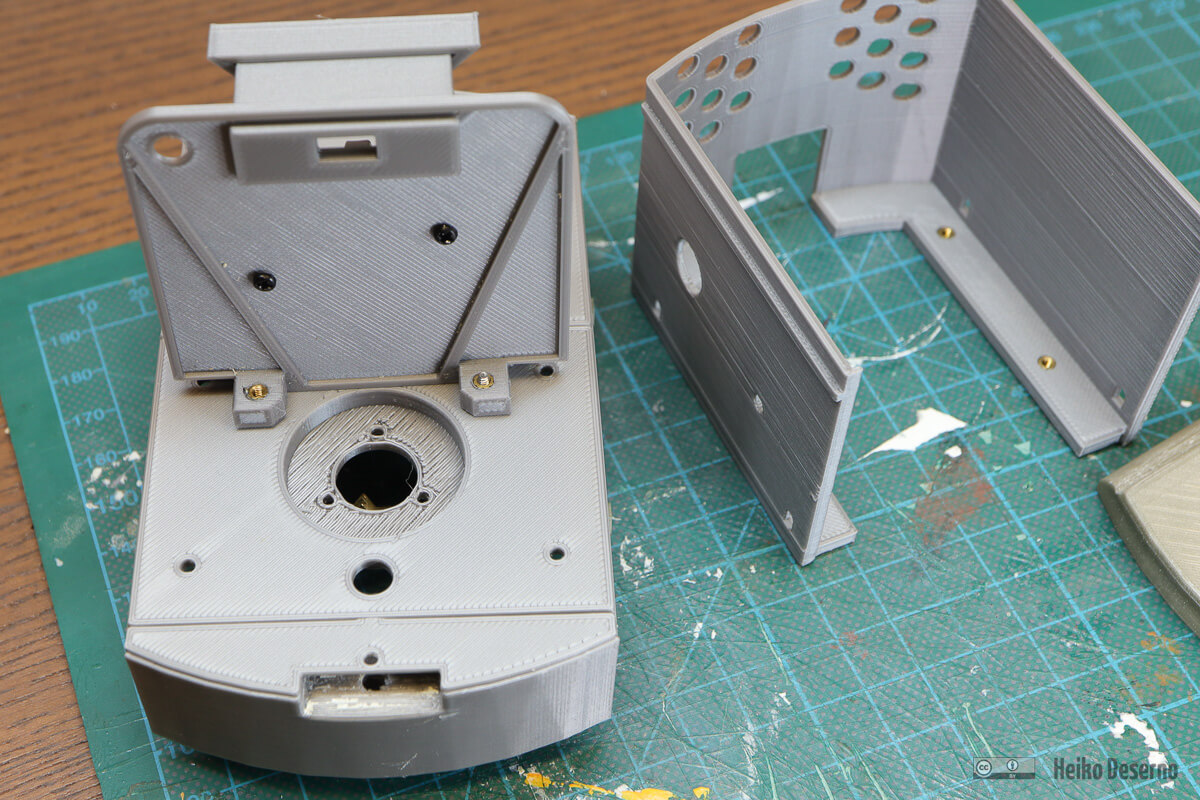
Die Motorhaube ist zweiteilig ausgeführt. Das Unterteil wurde problemlos mit Filament gedruckt. Zur Anbringung der Bohrungen für die M2-Einschmelzbuchsen existiert eine Bohrschablone. Über diese Buchsen wird die Motorhaube mit dem Lokrahmen verbunden. Das Oberteil der Motorhaube ist wegen der Wölbungen nicht so einfach anzufertigen. Beim Druck der Haube stehend gab es Probleme mit der Haftung, deshalb der liegende Druck mit feiner Düse. Jedoch ist die Druckqualität der Wölbungen nicht optimal. Die Zusatzteile wurden in Resin gedruckt und auf die Motorhaube geklebt.


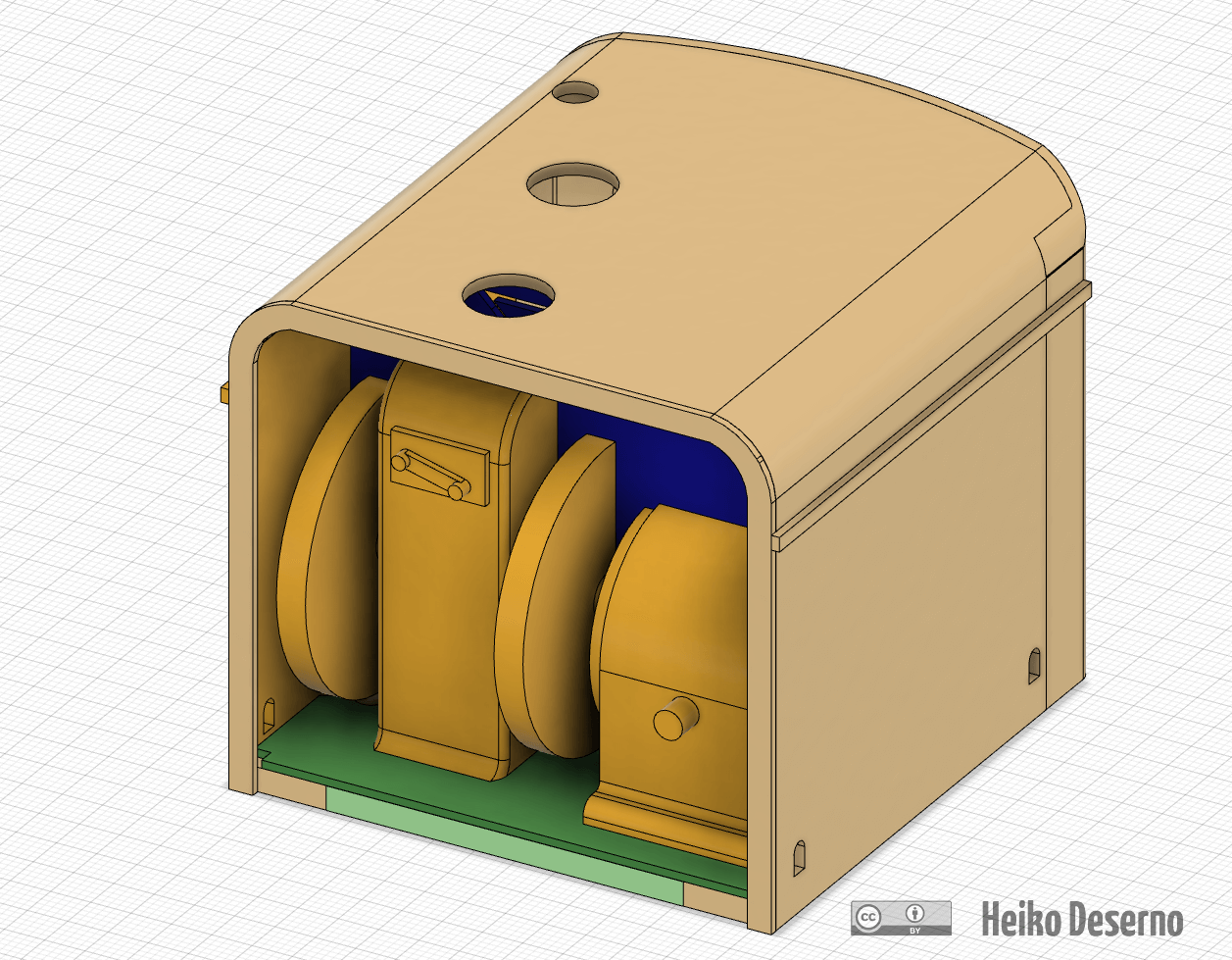
In die Motorhaube wurde zur Verdeckung des Motors und der Elektronik eine aus mehreren Einzelteilen bestehende Motor-Attrappe als Rückwand verbaut.
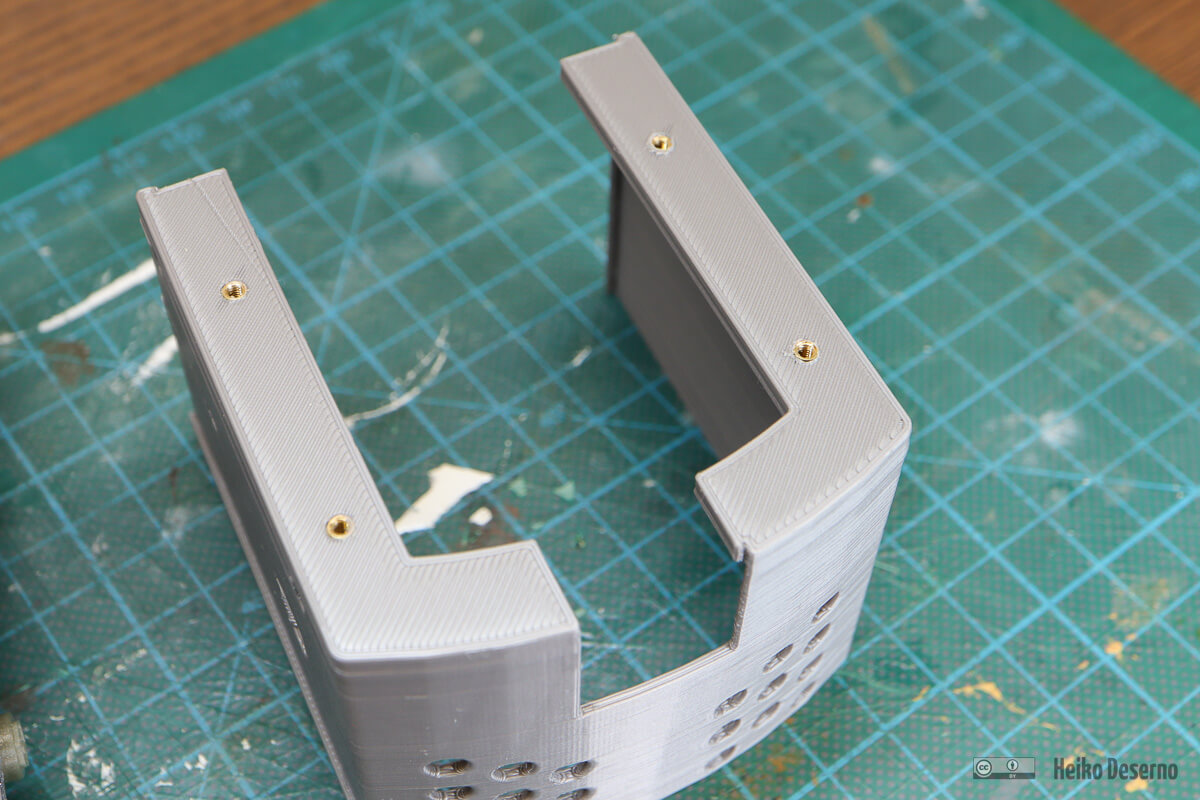
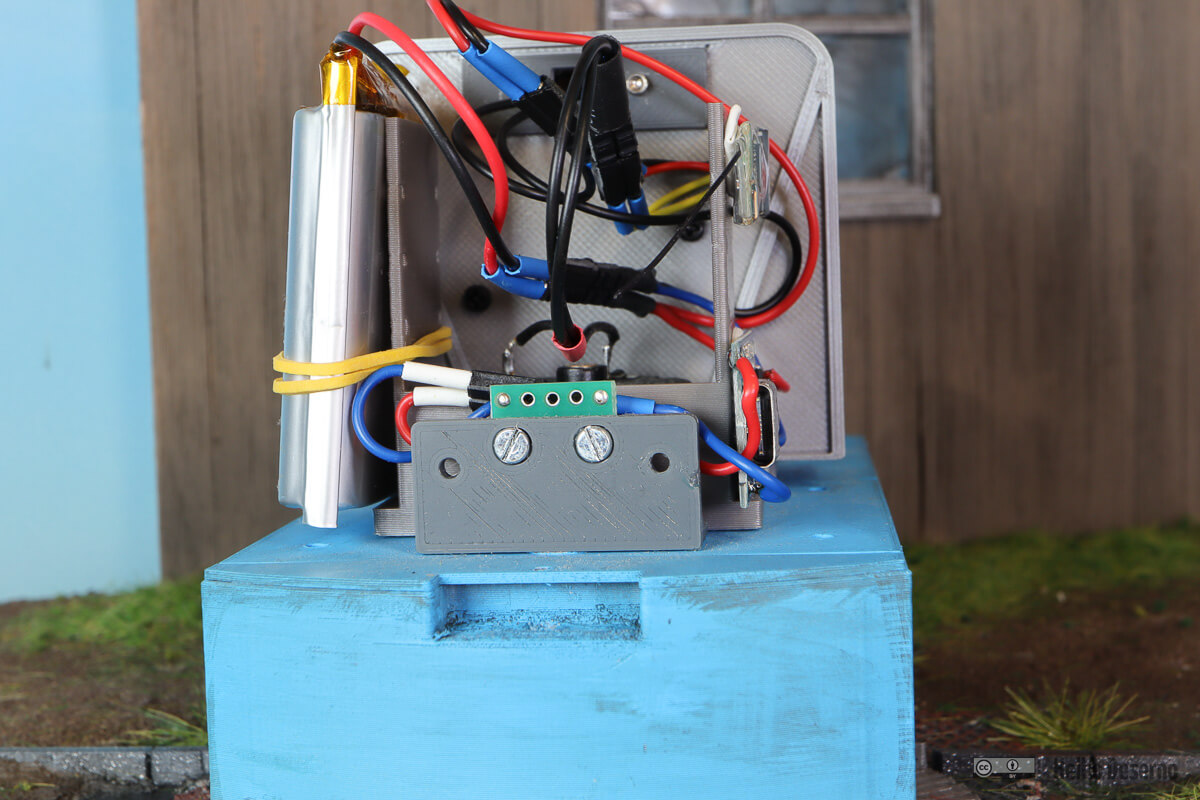
Der Sandkasten trägt den Hauptschalter des Fahrzeugs. Die Rückwand und die Motor-Attrappe wurden zu einem Teil zusammengefügt und mit M2-Einschmelzbuchsen versehen. Die gesamte Baugruppe wurde am Lokrahmen verschraubt.

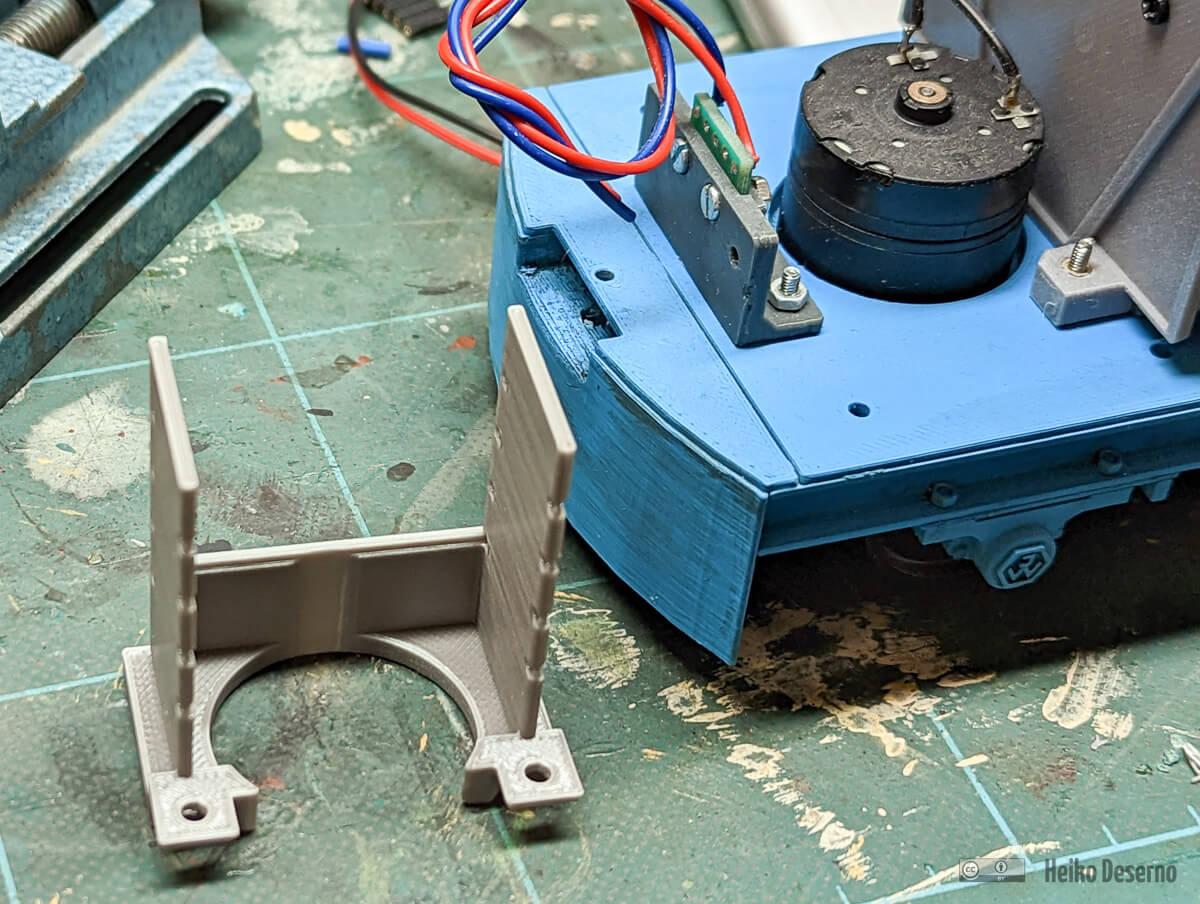
Bei der Endmontage fiel auf, dass der Akku und die elektronischen Komponenten unter der Motorhaube keinen richtigen Halt haben. Deshalb entstand noch ein zusätzlicher Halter, der mit der Rückwand verschraubt wird. Noch ein Vorteil des zusätzlichen Halters liegt darin, dass die Platinen für Empfänger und Lader so platziert werden können, dass die Status-Leds durch die Gehäuse-Öffnungen sichtbar sind (Lader: rot und blau, Empfänger: orange leuchtend und blinkend).
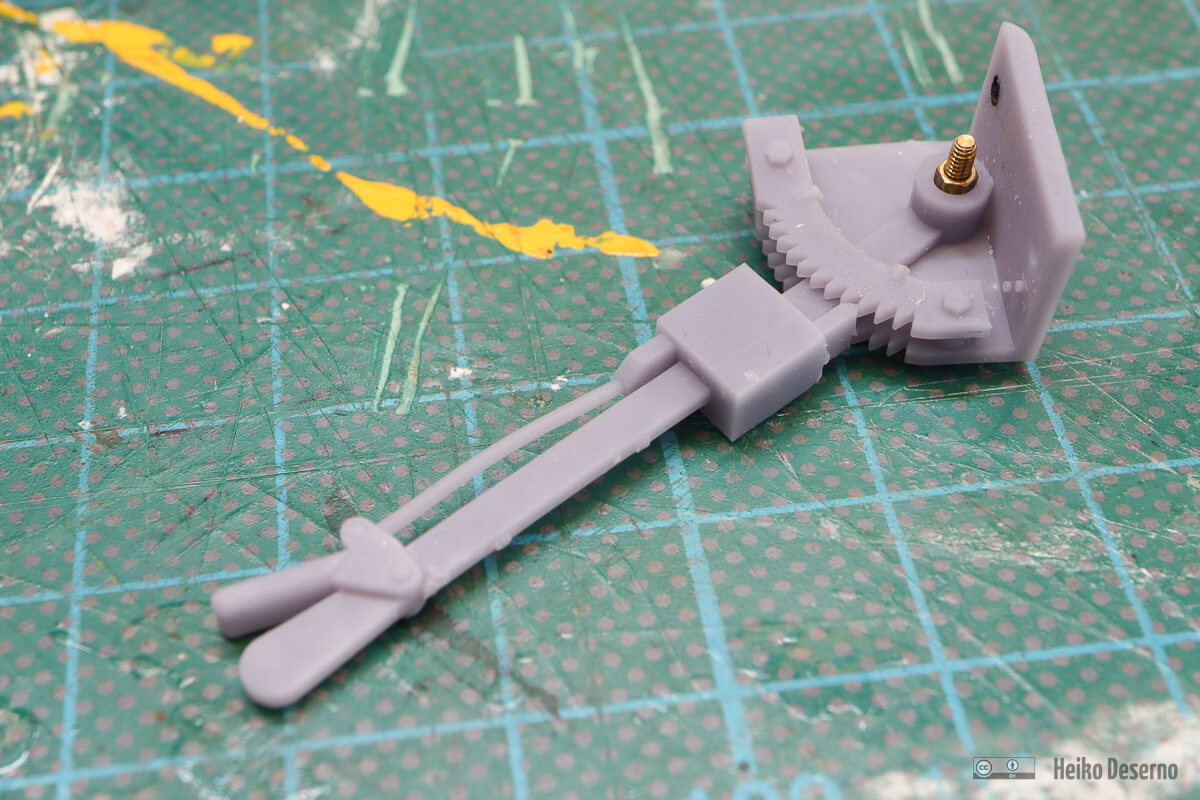
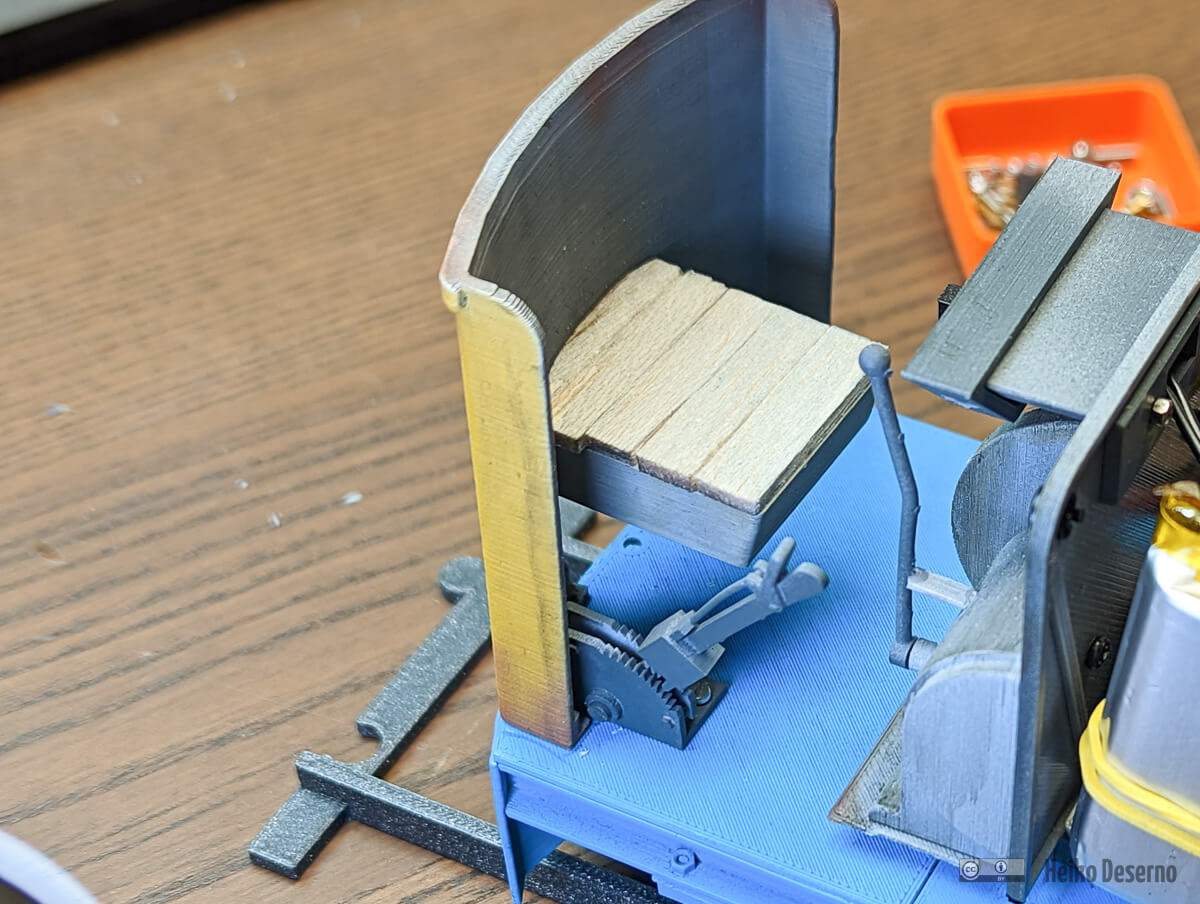
Ein optisch hervorstechendes Bauteil ist der Handbremshebel, der fein detailliert konstruiert wurde und auch nur als Resin-Druck so schön aussieht.
Die Rückwand und der Sitz sind jeweils ein Druckteil und wurden miteinander verklebt. Die Sitzfläche wurde mit Holz verkleidet.
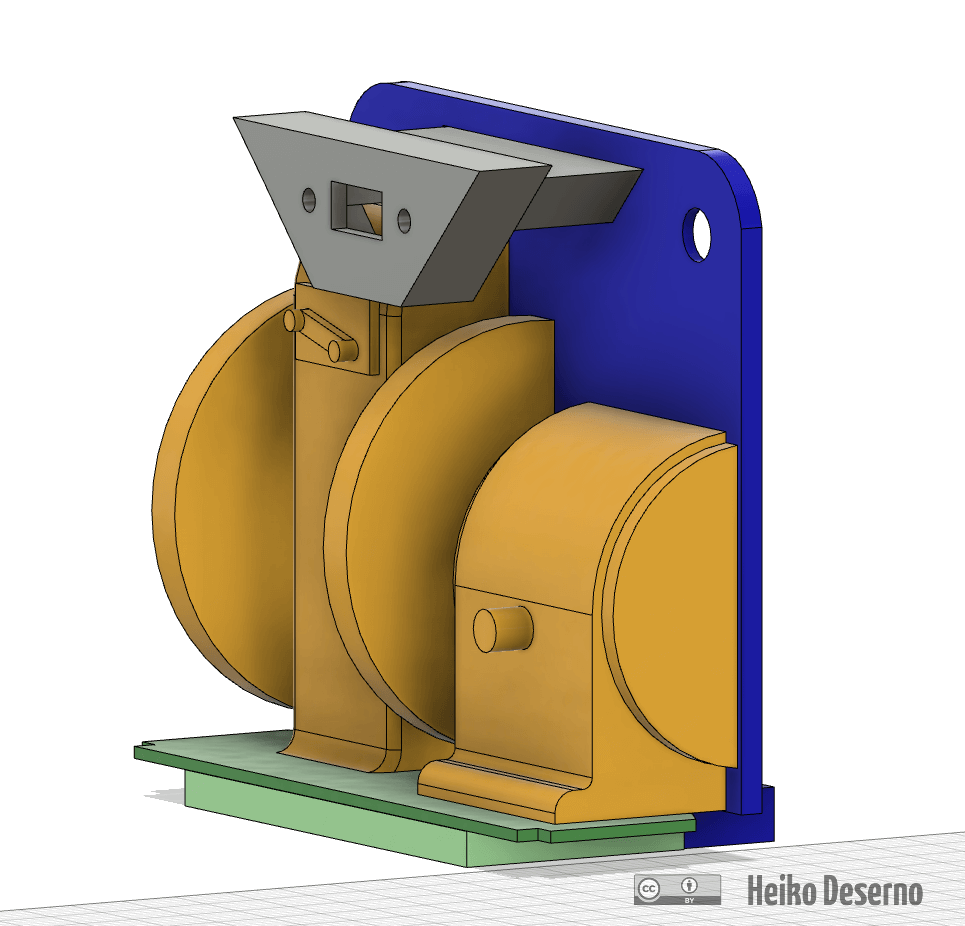
Farbgebung
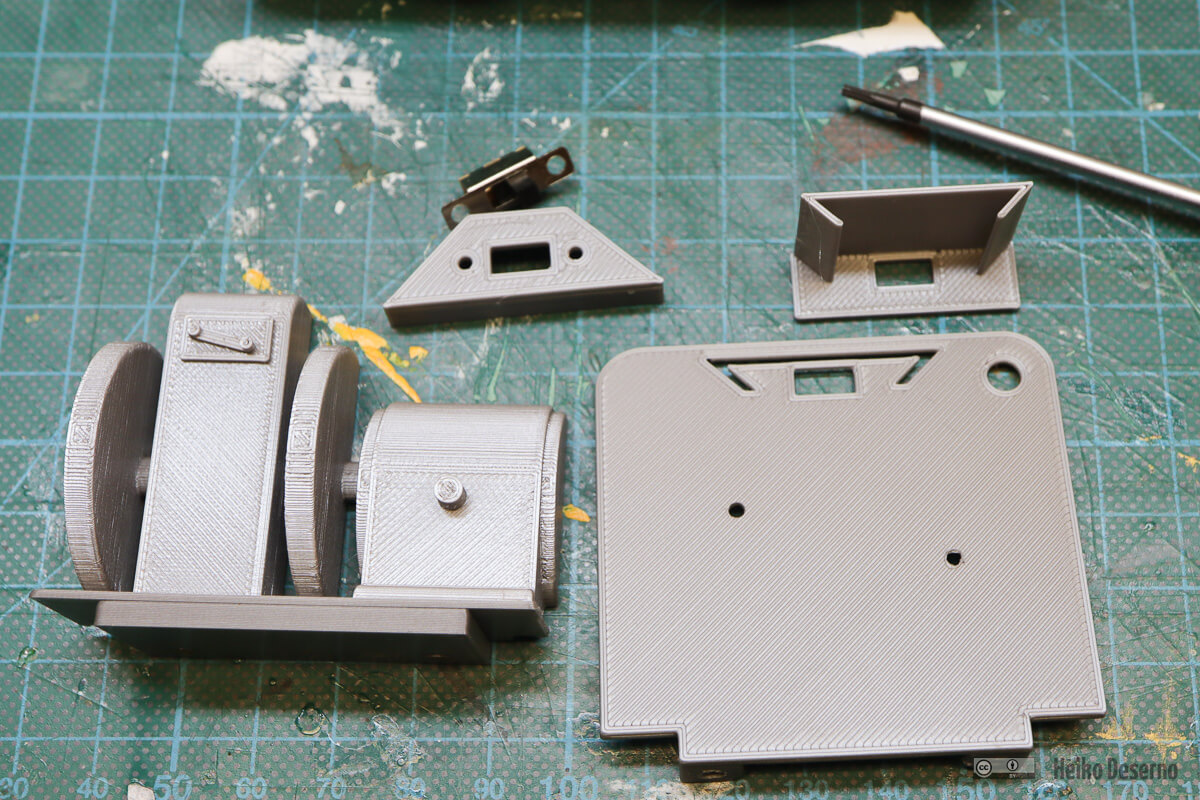
Die folgende Abbildung zeigt die fertig gebauten Baugruppen. Nur wenige Teile wie der Bremshebel, die Bremsbacken oder der Schalhebel wurden in Resin gedruckt. Die Bremsbacken habe ich bei meinem Modell nicht montiert. Zwar sind die Bohrungen für die Stangen in den Winkelprofilen mittels Bohrschablone bereits angebracht, jedoch habe ich später die Bohrungen in der Motorplatine zur Montage der Motorhaube ungünstig angebracht. Die vorgesehene Stange, welche die Bremsen aufnimmt, passte nicht mehr in die vorgesehene Bohrung.

Die Lackierung erfolgte nicht in dem Standard-Grün der Jenbach-Fahrzeuge, sondern in Gelb mit blauem Rahmen. Als Vorbild diente die JW20 in Bad Bleiberg (siehe Wikipedia). Nach unendlichen vielen Farbaufträgen der schrecklichen Farbe Gelb erfolgten noch einige Alterungsspuren mit der Airbrush-Pistole.
{kind=link}

Die Farbe grau kam am Motorblock und an der Innenseite der Rückwand inkl. Sitz zum Einsatz. Auch in diesen Bereichen wurden Alterungsspuren angebracht.

Montage
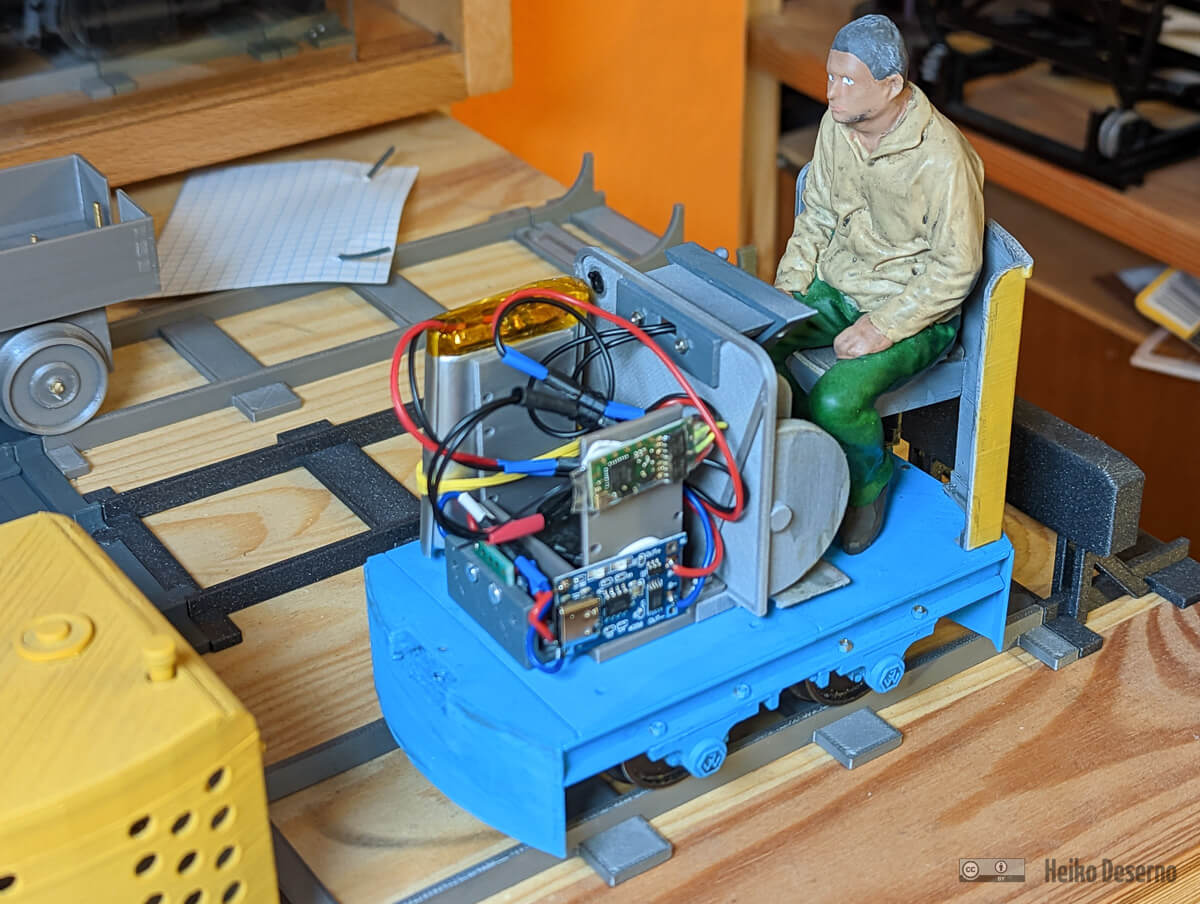
Nach der Lackierung wurden Achsen, Motor und weitere Antriebsteile montiert. Die Verbindung der Komponenten erfolgt über Steckverbindungen. Im nächsten Bild ist der fertig vorbereitete Deltang Rx60 zu sehen. Die schwarze Leitung links ist die Antenne, rechte Anschlüsse für Spannung und Motor. Der Schrumpfschlauch wurde bereits durch Micron Radio Control angebracht. Deshalb leider auch keine separate Status-Led am Fahrzeug.
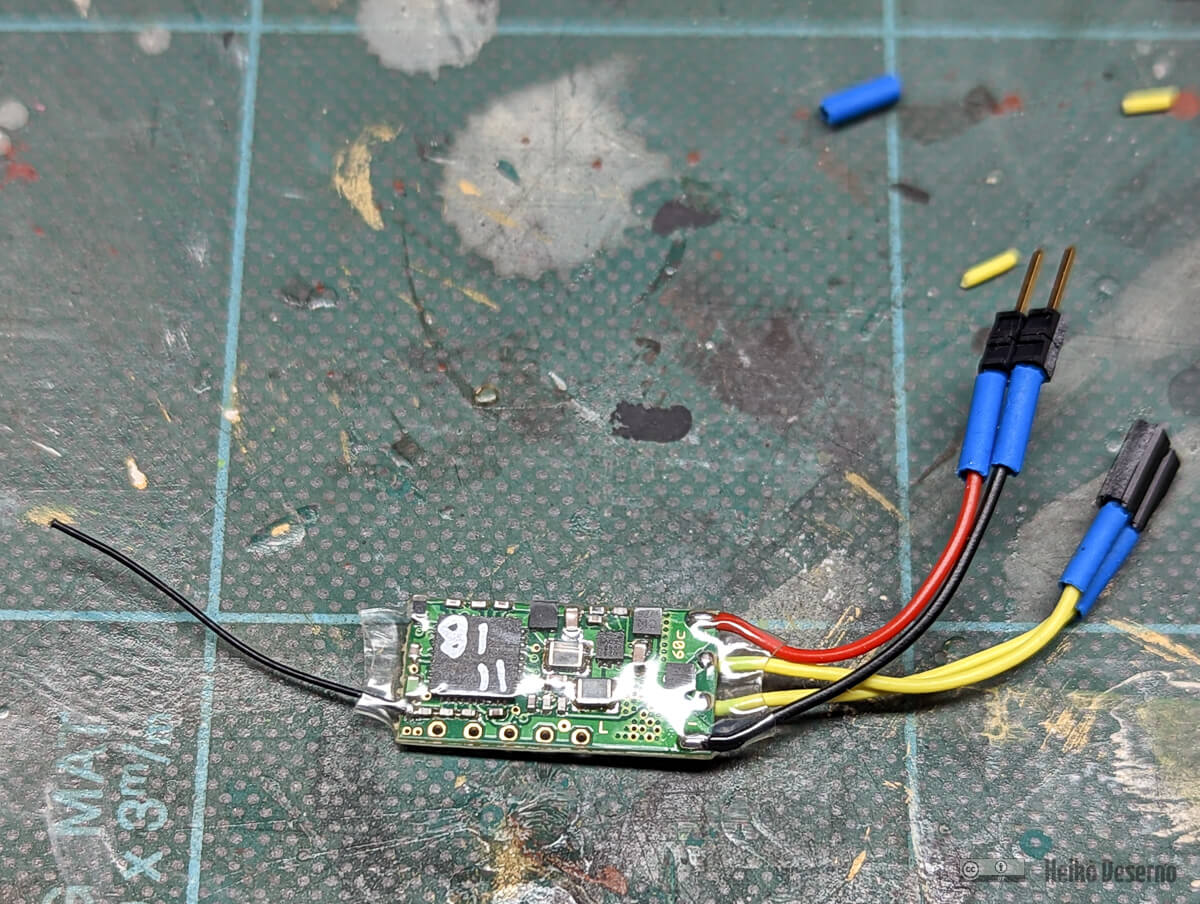
Im Fahrzeug ist ausreichend Platz für die Komponenten vorhanden. Der relativ große LiPo-Akku mit 1800 mAh wurde stehend platziert.
Die Deltang-Sender TX20 hatte ich in der Vergangenheit aus Micron Radio Control-Bausätzen selbst aufgebaut. Mittlerweile gib es einen Sender Tx20v2 in neuer Gehäuseform und nur fertig aufgebaut. Der Einschalter ist jetzt anders platziert und es gibt endlich einen Batteriefachdeckel.



380 g – ein ordentliches Kampfgewicht – bringt das fertige Modell auf die Waage. Die Abmessungen betragen 125 x 70 mm (Länge x Breite) und 95 mm Höhe.
Ladebuchse
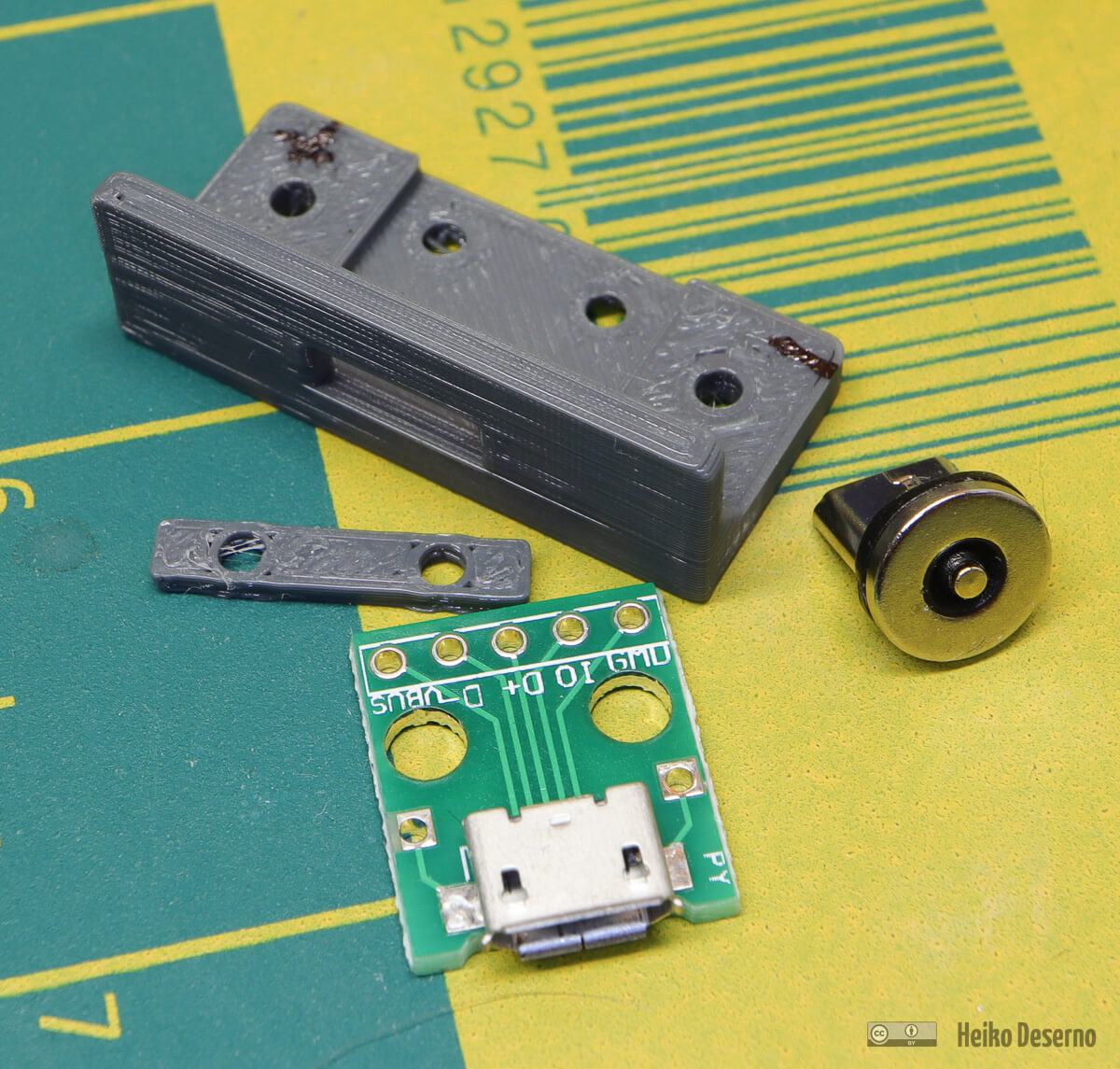
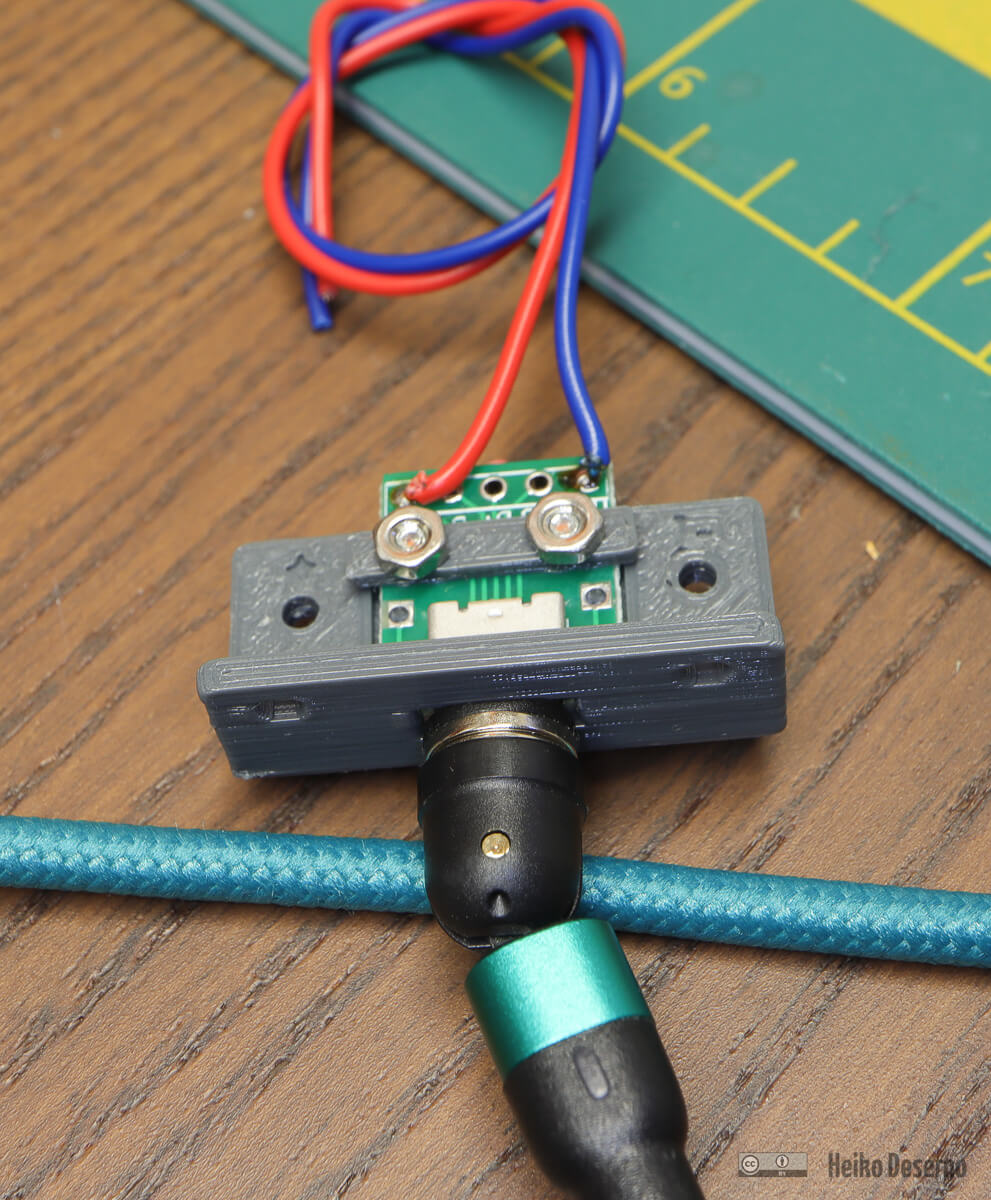
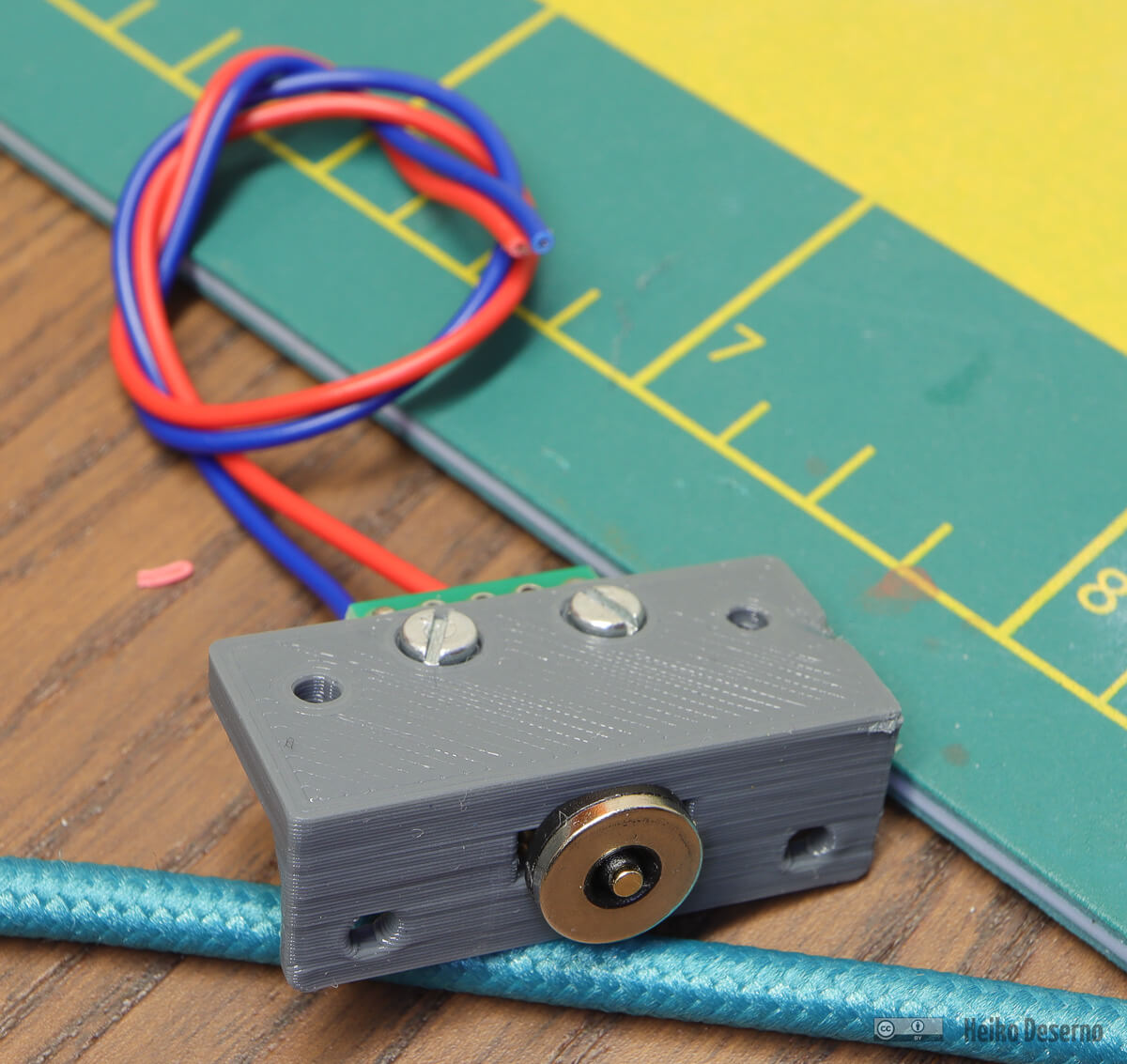
Für die nie endende Diskussion um die Ladebuchse habe ich eine neue Lösung entworfen. Statt der Mono-Klinkenbuchsen wurde eine USB-Buchse verbaut. Diese kleinen Platinen mit Lötanschlüssen gibt es für Micro-USB und USB-C. Dazu wurde ein Druckteil entworfen, auf dem die USB-Platine mit Schrauben vernünftig befestigt werden kann. Für den Anschluss des USB-Kabels habe ich eine Magnetkupplung beschafft. In dieser Variante wird nur die 5 V Spannung übertragen, die Datenleitungen werden nicht verwendet. Bei der Konstruktion der Motorplatine stand diese Variante noch nicht fest, deshalb fehlen dort die Bohrungen für die Befestigungsschrauben und das Loch für die Steckverbindung ist zu klein. An dieser Stelle war bei der Montage etwas Nacharbeit erforderlich.
USB-Ladebuchse mit Magnetkupplung

Diese Lösung gefällt mir ausgezeichnet und wird auch in künftigen Fahrzeugen verwendet. Insbesondere auch deshalb, weil die USB-Verbindung artgerecht verwendet wird, denn an der USB-Buchse versorgt den USB-Lader mit Spannung. Mit den stabileren USB-C Verbindungen könnte man auf die Magnetkupplung auch verzichten.
Galerie

Galerie des Jenbacher Ponys










Fazit
Dieses kleine Feldbahn-Fahrzeug hat eine lange Bauzeit benötigt. Die Arbeiten begannen bereits im April 2021. Ab Oktober 2021 gab es dann eine einjährige Pause. Der Lokrahmen war inkl. Motor montiert und auch alle Aufbauten waren bereits fertig. Einzig unklar war die Bremsanlage, für die keine einfache Montagelösung in Sicht war. Erst in diesem Herbst fand die zügige Endmontage ohne Bremsen statt. Längere Bauunterbrechungen in solchen Projekten sind immer schwierig. Je länger die Pause dauert, desto problemtaischer die Fortsetzung.
Nun entstand nach 1,5 jähriger Bauzeit ein funkgesteuertes und motorisiertes Feldbahn-Modell. Wegen der kleinen Räder und des kurzen Achsabstandes fährt das Fahrzeug sehr gut den engen Locoremote-Gleisen mit 45 mm Spurweite. Das Antriebskonzept mit Deltang-Empfänger und 3V-Technik ist bewährt. Leider gehen die beliebten Deltang Rx6-Empfänger langsam zur Neige und es gibt keinen Ersatz. Demnächst teste ich mal einen Rx45-Empfänger, die weiterhin lieferbar sind. In meinem speziellen Umfeld mit 3V-Spannung und kleinen Getriebemotoren sollte auch diese Technik gut funktionieren.
Die 380 g Gewicht verleihen der Lok gute Fahreigenschaften auch im Schiebebetrieb mit einigen Hunten auf engen Radien.
Die Fahrerfigur ist nicht Bestandteil des Download-Pakets.
Zum Nachbau der Modelle dieses Artikels ist ein Download-Paket mit digitalen Inhalten (3D-Druckdateien u.a.) verfügbar.
Paketgröße XL = 27 €
37 Druckdateien
Gemäß § 19 UStG wird keine Umsatzsteuer berechnet.
Paketgrößen und Preise anzeigen...
Paketgrößen und Preise
Download-Pakete haben je nach Komplexität und Detaillierung der 3D-Konstruktion sowie nach Umfang der zusätzlichen Dokumente/Bilder verschiedene Größen.
| Paketgröße | Preis |
|---|---|
| XS | 10 € |
| S | 13 € |
| M | 16 € |
| L | 22 € |
| XL | 27 € |
| XXL | 33 € |
| 3XL | 42 € |
Das Download-Paket kannst du über den Kaufen-Button erhalten. Die Kaufabwicklung erfolgt über Payhip Ldt. London. Nach der Zahlung kannst du den Inhalt von Payhip sofort herunterladen.
Vorheriger/Nächster Artikel
Die Kommentarfunktion steht nicht mehr zur Verfügung. Für Fragen oder Diskussionen zum Artikel nutze die Matrix.